 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSecuring Isosceles Triangular Formations under Heterogeneous Sensing and Mixed Constraints
Jan 02, 2021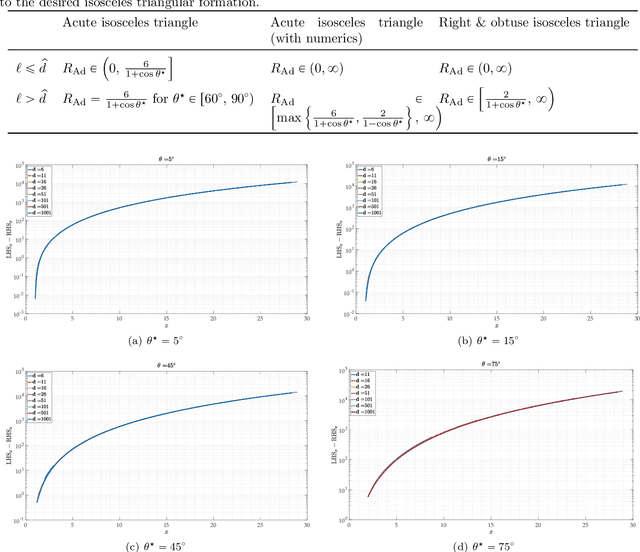
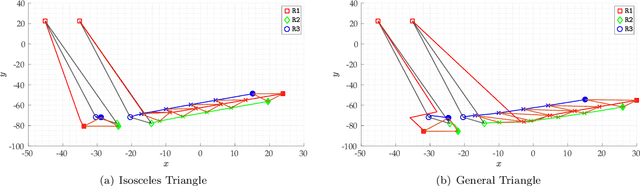
This paper focuses on securing a triangular shape (up to translation) for a team of three mobile robots that uses heterogeneous sensing mechanism. Based on the available local information, each robot employs the popular gradient-based control law to attain the assigned individual task(s). In the current work, robots are assigned either distance and signed area task(s) or bearing task(s). We provide a sufficient condition on the gain ratio $R_{\text{Ad}}$ between the signed area and the distance control term such that the desired formation shape, an isosceles triangle, is reached from all feasible starting positions. Numerical simulations are provided to support the theoretical analyses.
Angle-Constrained Formation Control for Circular Mobile Robots
May 10, 2020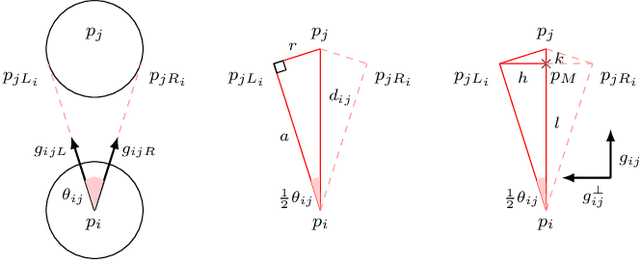
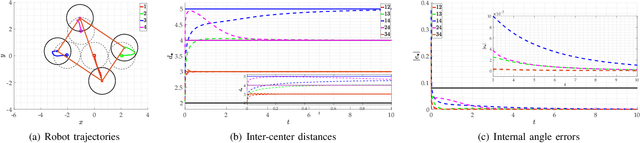
In this letter, we investigate the formation control problem of mobile robots moving in the plane where, instead of assuming robots to be simple points, each robot is assumed to have the form of a disk with equal radius. Based on interior angle measurements of the neighboring robots' disk, which can be obtained from low-cost vision sensors, we propose a gradient-based distributed control law and show the exponential convergence property of the associated error system. By construction, the proposed control law has the appealing property of ensuring collision avoidance between neighboring robots. We also present simulation results for {a team} of four circular mobile robots forming a rectangular shape.