 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynaMark: A Reinforcement Learning Framework for Dynamic Watermarking in Industrial Machine Tool Controllers
Aug 29, 2025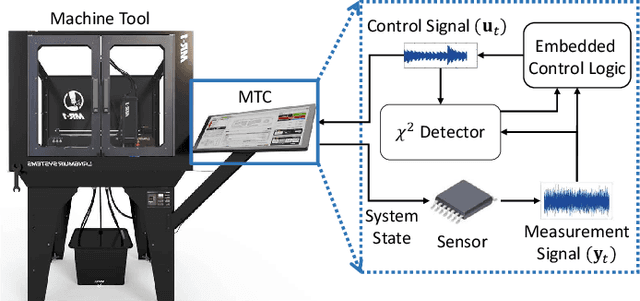
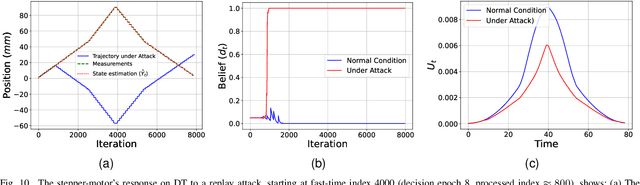
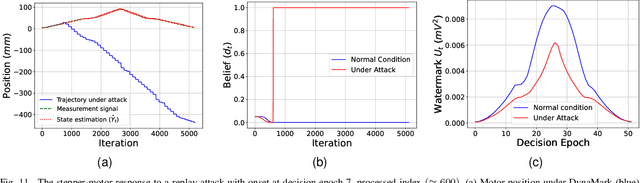
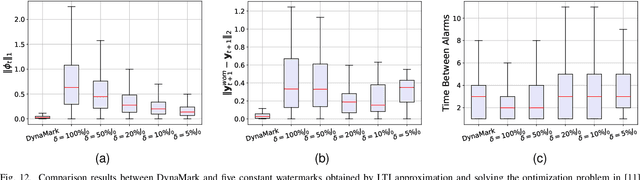
Industry 4.0's highly networked Machine Tool Controllers (MTCs) are prime targets for replay attacks that use outdated sensor data to manipulate actuators. Dynamic watermarking can reveal such tampering, but current schemes assume linear-Gaussian dynamics and use constant watermark statistics, making them vulnerable to the time-varying, partly proprietary behavior of MTCs. We close this gap with DynaMark, a reinforcement learning framework that models dynamic watermarking as a Markov decision process (MDP). It learns an adaptive policy online that dynamically adapts the covariance of a zero-mean Gaussian watermark using available measurements and detector feedback, without needing system knowledge. DynaMark maximizes a unique reward function balancing control performance, energy consumption, and detection confidence dynamically. We develop a Bayesian belief updating mechanism for real-time detection confidence in linear systems. This approach, independent of specific system assumptions, underpins the MDP for systems with linear dynamics. On a Siemens Sinumerik 828D controller digital twin, DynaMark achieves a reduction in watermark energy by 70% while preserving the nominal trajectory, compared to constant variance baselines. It also maintains an average detection delay equivalent to one sampling interval. A physical stepper-motor testbed validates these findings, rapidly triggering alarms with less control performance decline and exceeding existing benchmarks.
Feed-Forward Neural Networks as a Mixed-Integer Program
Feb 09, 2024Deep neural networks (DNNs) are widely studied in various applications. A DNN consists of layers of neurons that compute affine combinations, apply nonlinear operations, and produce corresponding activations. The rectified linear unit (ReLU) is a typical nonlinear operator, outputting the max of its input and zero. In scenarios like max pooling, where multiple input values are involved, a fixed-parameter DNN can be modeled as a mixed-integer program (MIP). This formulation, with continuous variables representing unit outputs and binary variables for ReLU activation, finds applications across diverse domains. This study explores the formulation of trained ReLU neurons as MIP and applies MIP models for training neural networks (NNs). Specifically, it investigates interactions between MIP techniques and various NN architectures, including binary DNNs (employing step activation functions) and binarized DNNs (with weights and activations limited to $-1,0,+1$). The research focuses on training and evaluating proposed approaches through experiments on handwritten digit classification models. The comparative study assesses the performance of trained ReLU NNs, shedding light on the effectiveness of MIP formulations in enhancing training processes for NNs.
A Variational Autoencoder Framework for Robust, Physics-Informed Cyberattack Recognition in Industrial Cyber-Physical Systems
Oct 10, 2023Cybersecurity of Industrial Cyber-Physical Systems is drawing significant concerns as data communication increasingly leverages wireless networks. A lot of data-driven methods were develope for detecting cyberattacks, but few are focused on distinguishing them from equipment faults. In this paper, we develop a data-driven framework that can be used to detect, diagnose, and localize a type of cyberattack called covert attacks on networked industrial control systems. The framework has a hybrid design that combines a variational autoencoder (VAE), a recurrent neural network (RNN), and a Deep Neural Network (DNN). This data-driven framework considers the temporal behavior of a generic physical system that extracts features from the time series of the sensor measurements that can be used for detecting covert attacks, distinguishing them from equipment faults, as well as localize the attack/fault. We evaluate the performance of the proposed method through a realistic simulation study on a networked power transmission system as a typical example of ICS. We compare the performance of the proposed method with the traditional model-based method to show its applicability and efficacy.