 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Human Body Motions from Skeleton-Based Observations for Robot-Assisted Therapy
Jul 25, 2022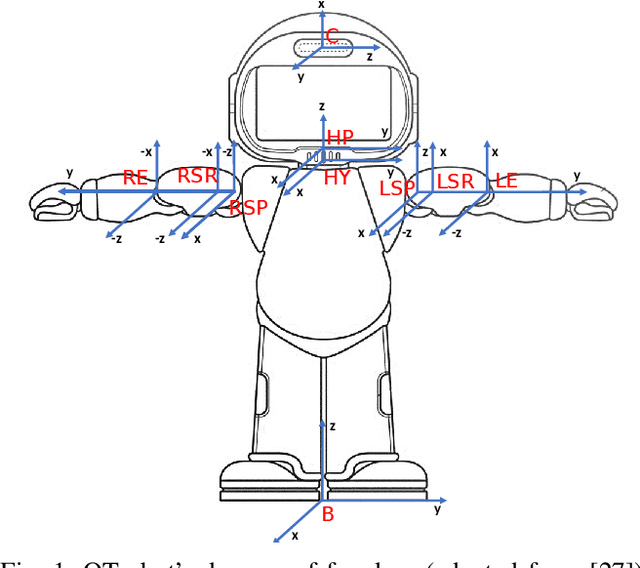
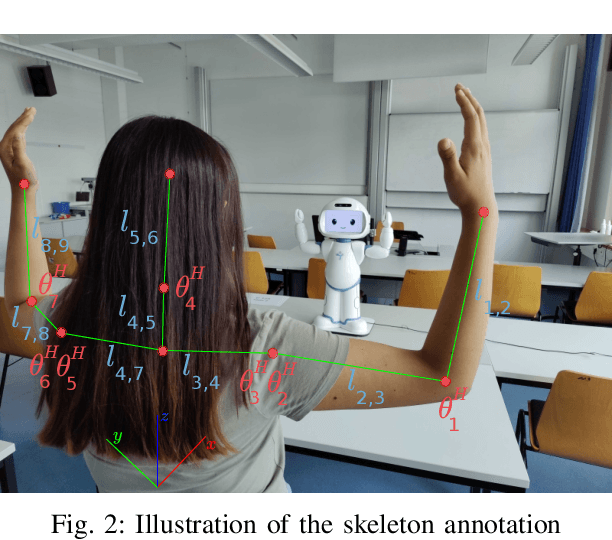
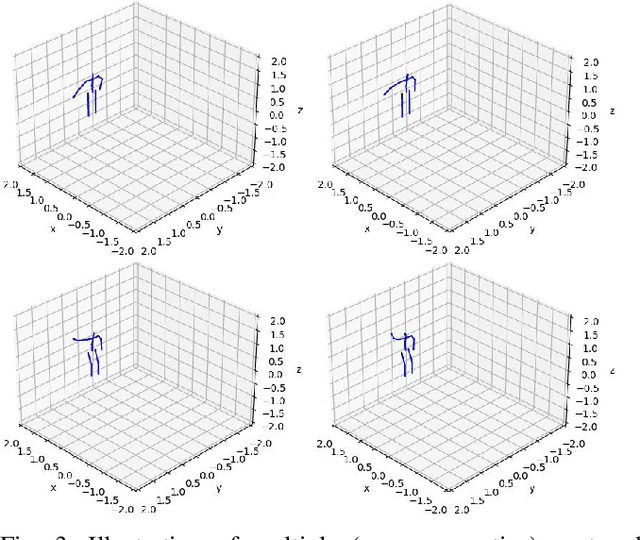
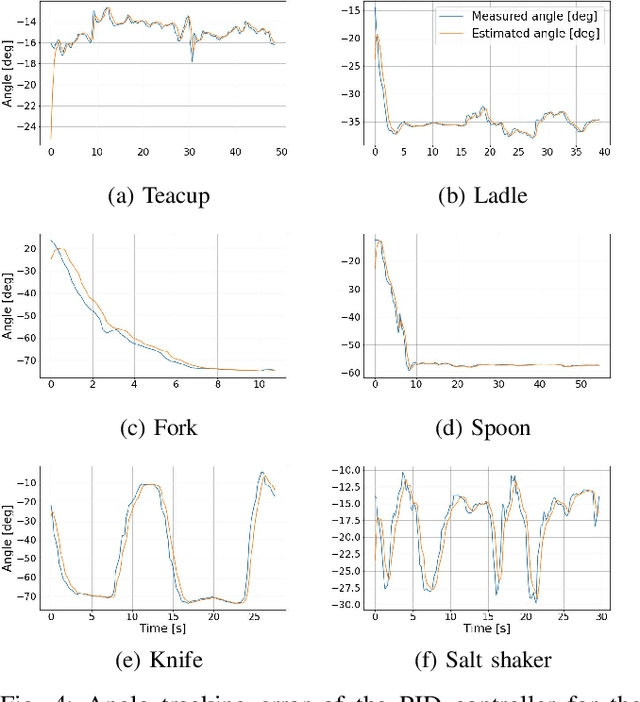
Robots applied in therapeutic scenarios, for instance in the therapy of individuals with Autism Spectrum Disorder, are sometimes used for imitation learning activities in which a person needs to repeat motions by the robot. To simplify the task of incorporating new types of motions that a robot can perform, it is desirable that the robot has the ability to learn motions by observing demonstrations from a human, such as a therapist. In this paper, we investigate an approach for acquiring motions from skeleton observations of a human, which are collected by a robot-centric RGB-D camera. Given a sequence of observations of various joints, the joint positions are mapped to match the configuration of a robot before being executed by a PID position controller. We evaluate the method, in particular the reproduction error, by performing a study with QTrobot in which the robot acquired different upper-body dance moves from multiple participants. The results indicate the method's overall feasibility, but also indicate that the reproduction quality is affected by noise in the skeleton observations.