 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLSP-YOLO: A Lightweight Single-Stage Network for Sitting Posture Recognition on Embedded Devices
Nov 18, 2025



With the rise in sedentary behavior, health problems caused by poor sitting posture have drawn increasing attention. Most existing methods, whether using invasive sensors or computer vision, rely on two-stage pipelines, which result in high intrusiveness, intensive computation, and poor real-time performance on embedded edge devices. Inspired by YOLOv11-Pose, a lightweight single-stage network for sitting posture recognition on embedded edge devices termed LSP-YOLO was proposed. By integrating partial convolution(PConv) and Similarity-Aware Activation Module(SimAM), a lightweight module, Light-C3k2, was designed to reduce computational cost while maintaining feature extraction capability. In the recognition head, keypoints were directly mapped to posture classes through pointwise convolution, and intermediate supervision was employed to enable efficient fusion of pose estimation and classification. Furthermore, a dataset containing 5,000 images across six posture categories was constructed for model training and testing. The smallest trained model, LSP-YOLO-n, achieved 94.2% accuracy and 251 Fps on personal computer(PC) with a model size of only 1.9 MB. Meanwhile, real-time and high-accuracy inference under constrained computational resources was demonstrated on the SV830C + GC030A platform. The proposed approach is characterized by high efficiency, lightweight design and deployability, making it suitable for smart classrooms, rehabilitation, and human-computer interaction applications.
On-Policy Pixel-Level Grasping Across the Gap Between Simulation and Reality
Apr 08, 2022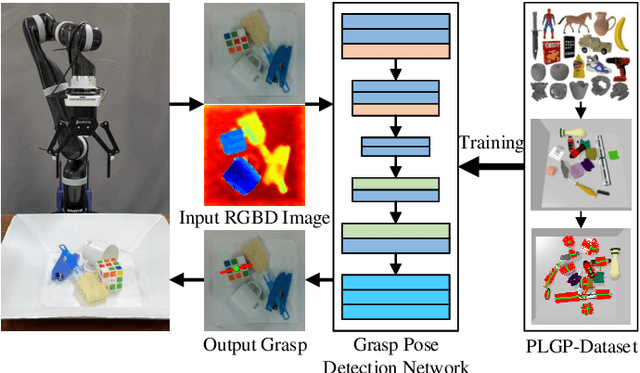
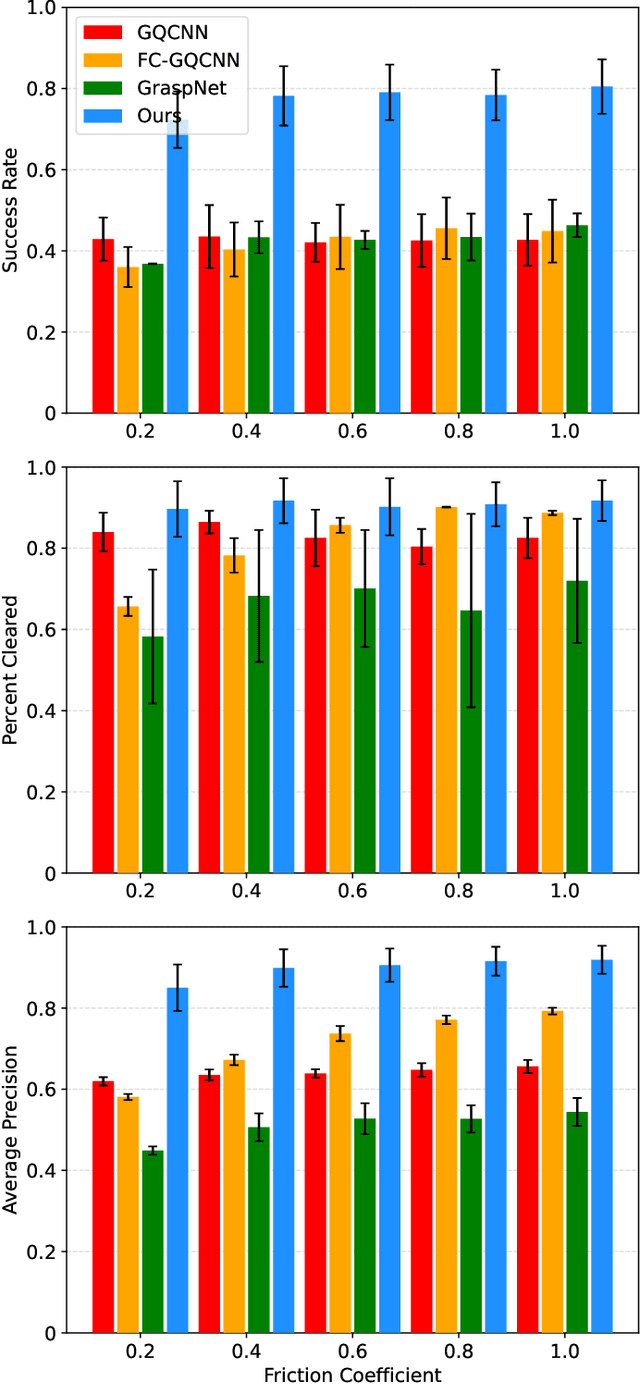
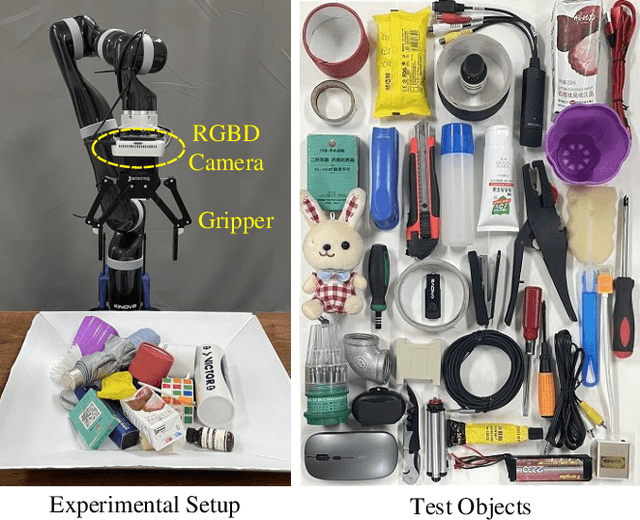
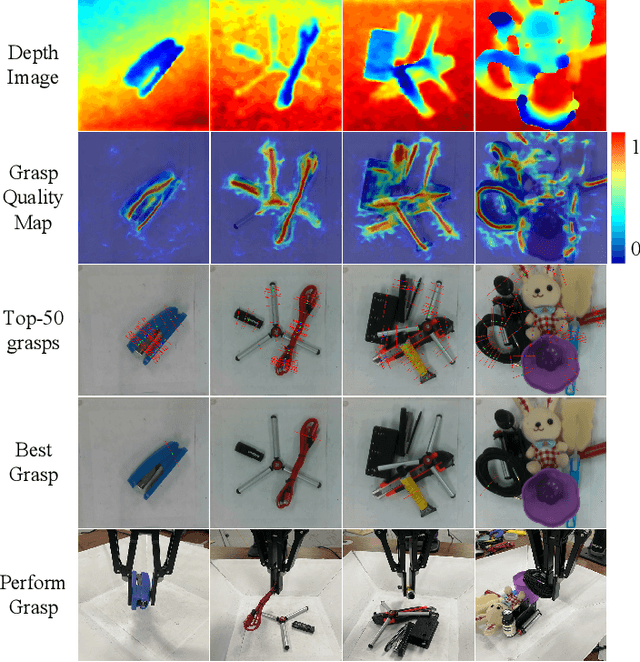
Grasp detection in cluttered scenes is a very challenging task for robots. Generating synthetic grasping data is a popular way to train and test grasp methods, as is Dex-net and GraspNet; yet, these methods generate training grasps on 3D synthetic object models, but evaluate at images or point clouds with different distributions, which reduces performance on real scenes due to sparse grasp labels and covariate shift. To solve existing problems, we propose a novel on-policy grasp detection method, which can train and test on the same distribution with dense pixel-level grasp labels generated on RGB-D images. A Parallel-Depth Grasp Generation (PDG-Generation) method is proposed to generate a parallel depth image through a new imaging model of projecting points in parallel; then this method generates multiple candidate grasps for each pixel and obtains robust grasps through flatness detection, force-closure metric and collision detection. Then, a large comprehensive Pixel-Level Grasp Pose Dataset (PLGP-Dataset) is constructed and released; distinguished with previous datasets with off-policy data and sparse grasp samples, this dataset is the first pixel-level grasp dataset, with the on-policy distribution where grasps are generated based on depth images. Lastly, we build and test a series of pixel-level grasp detection networks with a data augmentation process for imbalance training, which learn grasp poses in a decoupled manner on the input RGB-D images. Extensive experiments show that our on-policy grasp method can largely overcome the gap between simulation and reality, and achieves the state-of-the-art performance. Code and data are provided at https://github.com/liuchunsense/PLGP-Dataset.