 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControlling the Sense of Agency in Dyadic Robot Interaction: An Active Inference Approach
Mar 03, 2021



This study investigated how social interaction among robotic agents changes dynamically depending on individual sense of agency. In a set of simulation studies, we examine dyadic imitative interactions of robots using a variational recurrent neural network model. The model is based on the free energy principle such that interacting robots find themselves in a loop, attempting to predict and infer each other's actions using active inference. We examined how regulating the complexity term to minimize free energy during training determines the dynamic characteristics of networks and affects dyadic imitative interactions. Our simulation results show that through softer regulation of the complexity term, a robot with stronger agency develops and dominates its counterpart developed with weaker agency through tighter regulation. When two robots are trained with equally soft regulation, both generate individual intended behavior patterns, ignoring each other. We argue that primary intersubjectivity does develop in dyadic robotic interactions.
A Neurorobotics Approach to Investigating the Emergence of Communication in Robots
Apr 05, 2019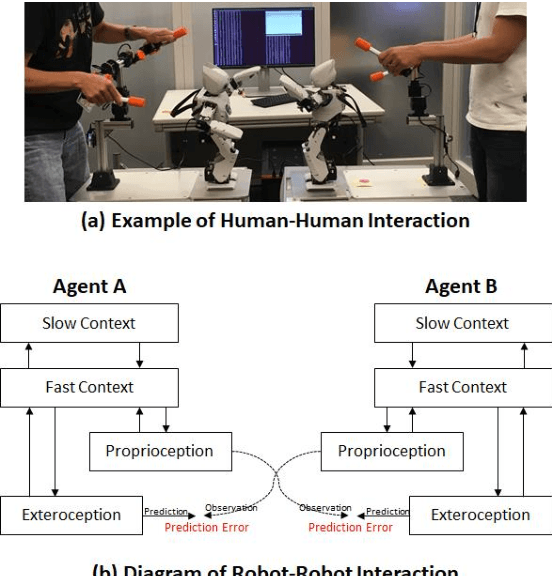
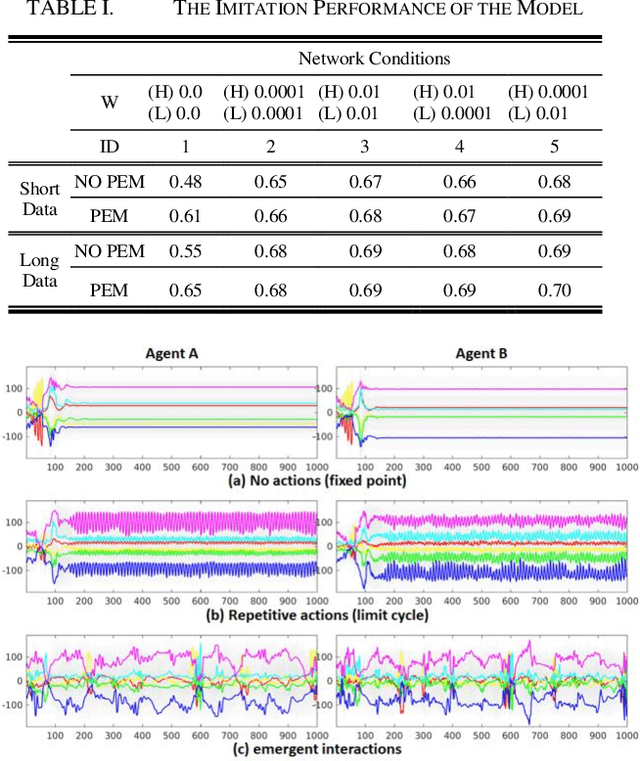
This paper introduces our approach to building a robot with communication capability based on the two key features: stochastic neural dynamics and prediction error minimization (PEM). A preliminary experiment with humanoid robots showed that the robot was able to imitate other's action by means of those key features. In addition, we found that some sorts of communicative patterns emerged between two robots in which the robots inferred the intention of another agent behind the sensory observation.