Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Neurorobotics Approach to Investigating the Emergence of Communication in Robots
Paper and Code
Apr 05, 2019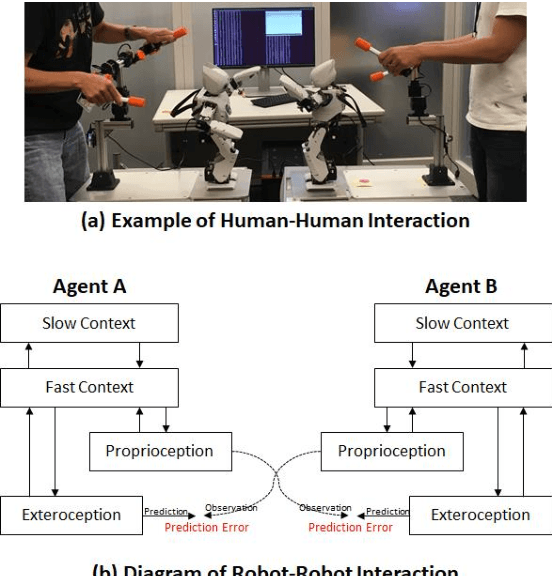
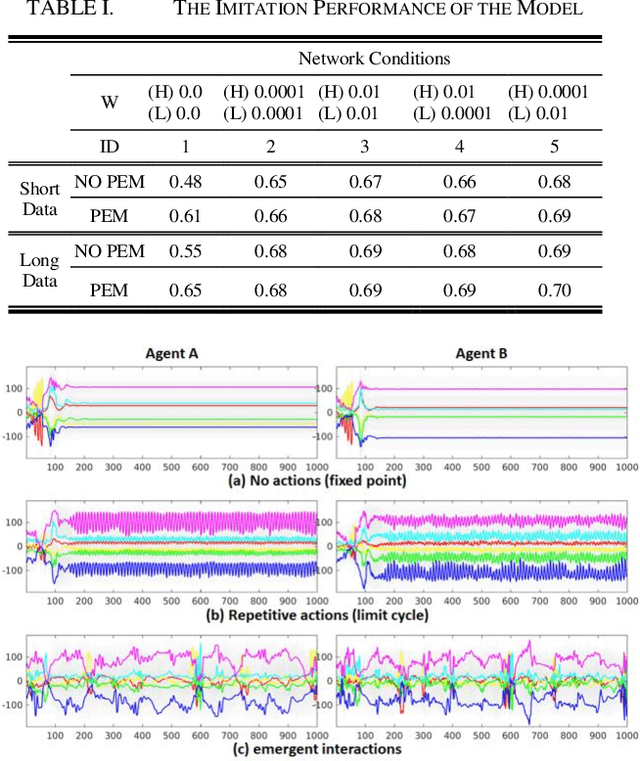
This paper introduces our approach to building a robot with communication capability based on the two key features: stochastic neural dynamics and prediction error minimization (PEM). A preliminary experiment with humanoid robots showed that the robot was able to imitate other's action by means of those key features. In addition, we found that some sorts of communicative patterns emerged between two robots in which the robots inferred the intention of another agent behind the sensory observation.
* Late-Breaking-Report at HRI'19 in Daegu, Korea
View paper on