 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBy Land, Air, or Sea: Multi-Domain Robot Communication Via Motion
Mar 07, 2019
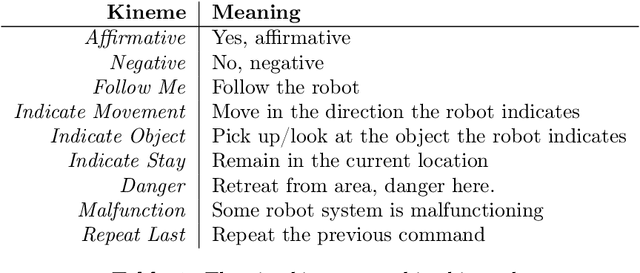
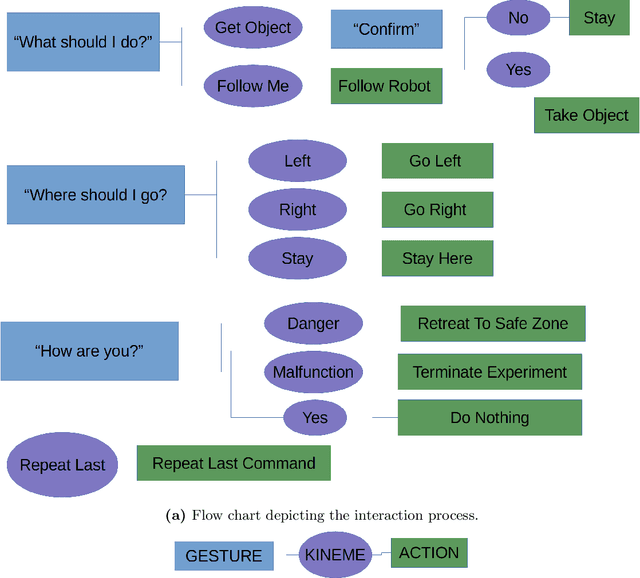
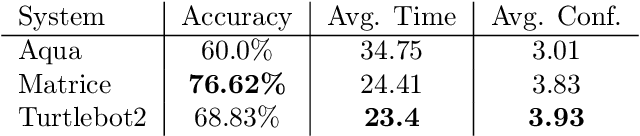
In this paper, we explore the use of motion for robot-to-human communication on three robotic platforms: the 5 degrees-of-freedom (DOF) Aqua autonomous underwater vehicle (AUV), a 3-DOF camera gimbal mounted on a Matrice 100 drone, and a 3-DOF Turtlebot2 terrestrial robot. While we previously explored the use of body language-like motion (called kinemes) versus other methods of communication for the Aqua AUV, we now extend those concepts to robots in two new and different domains. We evaluate all three platforms using a small interaction study where participants use gestures to communicate with the robot, receive information from the robot via kinemes, and then take actions based on the information. To compare the three domains we consider the accuracy of these interactions, the time it takes to complete them, and how confident users feel in the success of their interactions. The kineme systems perform with reasonable accuracy for all robots and experience gained in this study is used to form a set of prescriptions for further development of kineme systems.