 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Underwater Localization of Buoyancy Driven microFloats Using Acoustic Time-of-Flight Measurements
Dec 13, 2025



Accurate underwater localization remains a challenge for inexpensive autonomous platforms that require highfrequency position updates. In this paper, we present a robust, low-cost localization pipeline for buoyancy-driven microFloats operating in coastal waters. We build upon previous work by introducing a bidirectional acoustic Time-of-Flight (ToF) localization framework, which incorporates both float-to-buoy and buoy-to-float transmissions, thereby increasing the number of usable measurements. The method integrates nonlinear trilateration with a filtering of computed position estimates based on geometric cost and Cramer-Rao Lower Bounds (CRLB). This approach removes outliers caused by multipath effects and other acoustic errors from the ToF estimation and improves localization robustness without relying on heavy smoothing. We validate the framework in two field deployments in Puget Sound, Washington, USA. The localization pipeline achieves median positioning errors below 4 m relative to GPS positions. The filtering technique shows a reduction in mean error from 139.29 m to 12.07 m, and improved alignment of trajectories with GPS paths. Additionally, we demonstrate a Time-Difference-of-Arrival (TDoA) localization for unrecovered floats that were transmitting during the experiment. Range-based acoustic localization techniques are widely used and generally agnostic to hardware-this work aims to maximize their utility by improving positioning frequency and robustness through careful algorithmic design.
An Open-source Sim2Real Approach for Sensor-independent Robot Navigation in a Grid
Nov 05, 2024


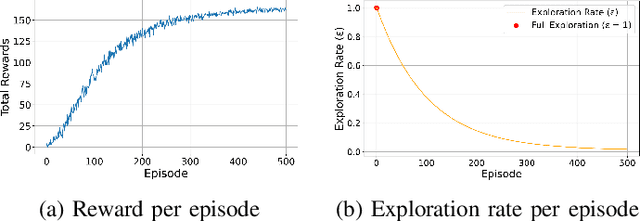
This paper presents a Sim2Real (Simulation to Reality) approach to bridge the gap between a trained agent in a simulated environment and its real-world implementation in navigating a robot in a similar setting. Specifically, we focus on navigating a quadruped robot in a real-world grid-like environment inspired by the Gymnasium Frozen Lake -- a highly user-friendly and free Application Programming Interface (API) to develop and test Reinforcement Learning (RL) algorithms. We detail the development of a pipeline to transfer motion policies learned in the Frozen Lake simulation to a physical quadruped robot, thus enabling autonomous navigation and obstacle avoidance in a grid without relying on expensive localization and mapping sensors. The work involves training an RL agent in the Frozen Lake environment and utilizing the resulting Q-table to control a 12 Degrees-of-Freedom (DOF) quadruped robot. In addition to detailing the RL implementation, inverse kinematics-based quadruped gaits, and the transfer policy pipeline, we open-source the project on GitHub and include a demonstration video of our Sim2Real transfer approach. This work provides an accessible, straightforward, and low-cost framework for researchers, students, and hobbyists to explore and implement RL-based robot navigation in real-world grid environments.
GPS-IDS: An Anomaly-based GPS Spoofing Attack Detection Framework for Autonomous Vehicles
May 14, 2024



Autonomous Vehicles (AVs) heavily rely on sensors and communication networks like Global Positioning System (GPS) to navigate autonomously. Prior research has indicated that networks like GPS are vulnerable to cyber-attacks such as spoofing and jamming, thus posing serious risks like navigation errors and system failures. These threats are expected to intensify with the widespread deployment of AVs, making it crucial to detect and mitigate such attacks. This paper proposes GPS Intrusion Detection System, or GPS-IDS, an Anomaly Behavior Analysis (ABA)-based intrusion detection framework to detect GPS spoofing attacks on AVs. The framework uses a novel physics-based vehicle behavior model where a GPS navigation model is integrated into the conventional dynamic bicycle model for accurate AV behavior representation. Temporal features derived from this behavior model are analyzed using machine learning to detect normal and abnormal navigation behavior. The performance of the GPS-IDS framework is evaluated on the AV-GPS-Dataset - a real-world dataset collected by the team using an AV testbed. The dataset has been publicly released for the global research community. To the best of our knowledge, this dataset is the first of its kind and will serve as a useful resource to address such security challenges.
An Anomaly Behavior Analysis Framework for Securing Autonomous Vehicle Perception
Oct 08, 2023As a rapidly growing cyber-physical platform, Autonomous Vehicles (AVs) are encountering more security challenges as their capabilities continue to expand. In recent years, adversaries are actively targeting the perception sensors of autonomous vehicles with sophisticated attacks that are not easily detected by the vehicles' control systems. This work proposes an Anomaly Behavior Analysis approach to detect a perception sensor attack against an autonomous vehicle. The framework relies on temporal features extracted from a physics-based autonomous vehicle behavior model to capture the normal behavior of vehicular perception in autonomous driving. By employing a combination of model-based techniques and machine learning algorithms, the proposed framework distinguishes between normal and abnormal vehicular perception behavior. To demonstrate the application of the framework in practice, we performed a depth camera attack experiment on an autonomous vehicle testbed and generated an extensive dataset. We validated the effectiveness of the proposed framework using this real-world data and released the dataset for public access. To our knowledge, this dataset is the first of its kind and will serve as a valuable resource for the research community in evaluating their intrusion detection techniques effectively.
Quantized Transformer Language Model Implementations on Edge Devices
Oct 06, 2023Large-scale transformer-based models like the Bidirectional Encoder Representations from Transformers (BERT) are widely used for Natural Language Processing (NLP) applications, wherein these models are initially pre-trained with a large corpus with millions of parameters and then fine-tuned for a downstream NLP task. One of the major limitations of these large-scale models is that they cannot be deployed on resource-constrained devices due to their large model size and increased inference latency. In order to overcome these limitations, such large-scale models can be converted to an optimized FlatBuffer format, tailored for deployment on resource-constrained edge devices. Herein, we evaluate the performance of such FlatBuffer transformed MobileBERT models on three different edge devices, fine-tuned for Reputation analysis of English language tweets in the RepLab 2013 dataset. In addition, this study encompassed an evaluation of the deployed models, wherein their latency, performance, and resource efficiency were meticulously assessed. Our experiment results show that, compared to the original BERT large model, the converted and quantized MobileBERT models have 160$\times$ smaller footprints for a 4.1% drop in accuracy while analyzing at least one tweet per second on edge devices. Furthermore, our study highlights the privacy-preserving aspect of TinyML systems as all data is processed locally within a serverless environment.