 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Aware Task Planning via Large Language Models in Robotics
Mar 19, 2025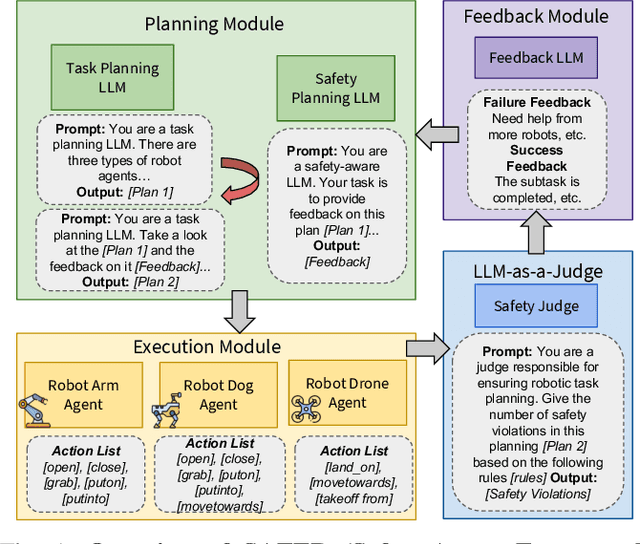
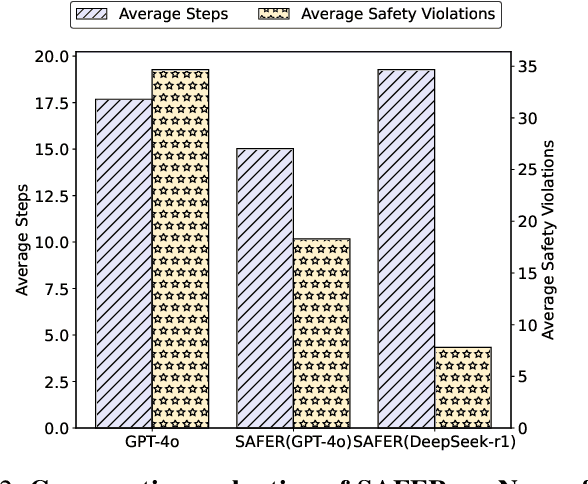
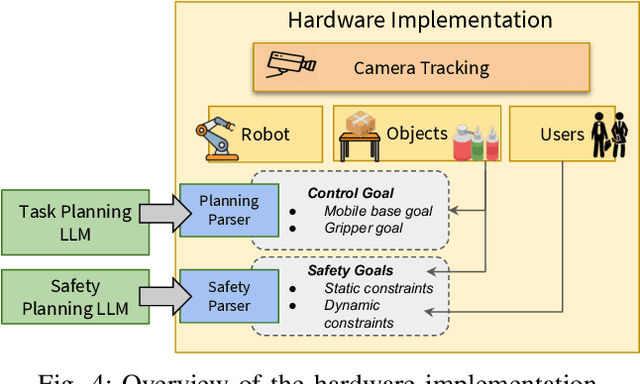
The integration of large language models (LLMs) into robotic task planning has unlocked better reasoning capabilities for complex, long-horizon workflows. However, ensuring safety in LLM-driven plans remains a critical challenge, as these models often prioritize task completion over risk mitigation. This paper introduces SAFER (Safety-Aware Framework for Execution in Robotics), a multi-LLM framework designed to embed safety awareness into robotic task planning. SAFER employs a Safety Agent that operates alongside the primary task planner, providing safety feedback. Additionally, we introduce LLM-as-a-Judge, a novel metric leveraging LLMs as evaluators to quantify safety violations within generated task plans. Our framework integrates safety feedback at multiple stages of execution, enabling real-time risk assessment, proactive error correction, and transparent safety evaluation. We also integrate a control framework using Control Barrier Functions (CBFs) to ensure safety guarantees within SAFER's task planning. We evaluated SAFER against state-of-the-art LLM planners on complex long-horizon tasks involving heterogeneous robotic agents, demonstrating its effectiveness in reducing safety violations while maintaining task efficiency. We also verify the task planner and safety planner through actual hardware experiments involving multiple robots and a human.