 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReproducing AmbientGAN: Generative models from lossy measurements
Oct 23, 2018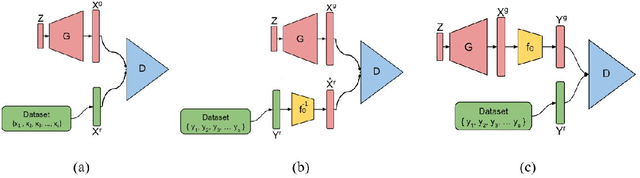

In recent years, Generative Adversarial Networks (GANs) have shown substantial progress in modeling complex distributions of data. These networks have received tremendous attention since they can generate implicit probabilistic models that produce realistic data using a stochastic procedure. While such models have proven highly effective in diverse scenarios, they require a large set of fully-observed training samples. In many applications access to such samples are difficult or even impractical and only noisy or partial observations of the desired distribution is available. Recent research has tried to address the problem of incompletely observed samples to recover the distribution of the data. \citep{zhu2017unpaired} and \citep{yeh2016semantic} proposed methods to solve ill-posed inverse problem using cycle-consistency and latent-space mappings in adversarial networks, respectively. \citep{bora2017compressed} and \citep{kabkab2018task} have applied similar adversarial approaches to the problem of compressed sensing. In this work, we focus on a new variant of GAN models called AmbientGAN, which incorporates a measurement process (e.g. adding noise, data removal and projection) into the GAN training. While in the standard GAN, the discriminator distinguishes a generated image from a real image, in AmbientGAN model the discriminator has to separate a real measurement from a simulated measurement of a generated image. The results shown by \citep{bora2018ambientgan} are quite promising for the problem of incomplete data, and have potentially important implications for generative approaches to compressed sensing and ill-posed problems.
* This work was submitted as final project for the course IFT6135: Representation Learning - A Deep Learning Course, University of Montreal, Winter 2018