 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePick and Place Planning is Better than Pick Planning then Place Planning
Jan 29, 2024



Robotic pick and place stands at the heart of autonomous manipulation. When conducted in cluttered or complex environments robots must jointly reason about the selected grasp and desired placement locations to ensure success. While several works have examined this joint pick-and-place problem, none have fully leveraged recent learning-based approaches for multi-fingered grasp planning. We present a modular algorithm for joint pick and place planning that can make use of state of the art grasp classifiers for planning multi-fingered grasps for novel objects from partial view point clouds. We demonstrate our joint pick and place formulation with several costs associated with different placement tasks. Experiments on pick and place tasks with cluttered scenes using a physical robot show that our joint inference method is more successful than a sequential pick then place approach, while also achieving better placement configurations.
Comparing Piezoresistive Substrates for Tactile Sensing in Dexterous Hands
Nov 11, 2020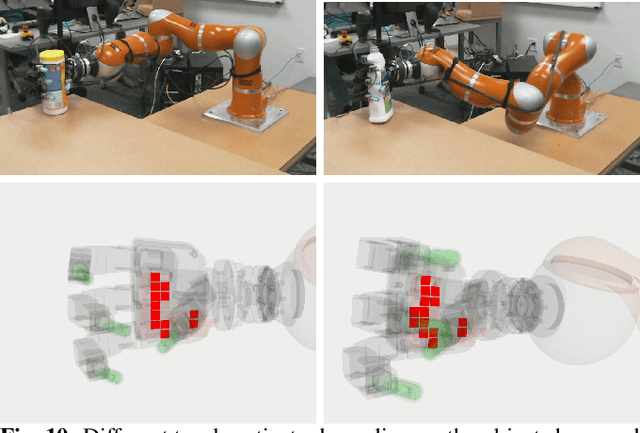
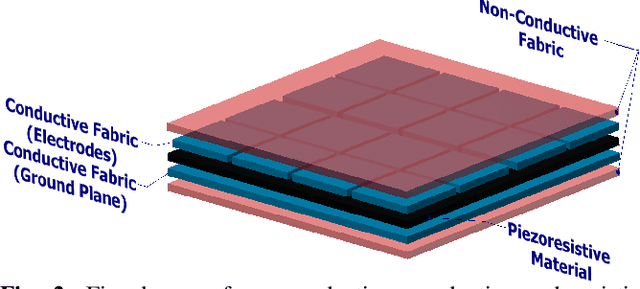
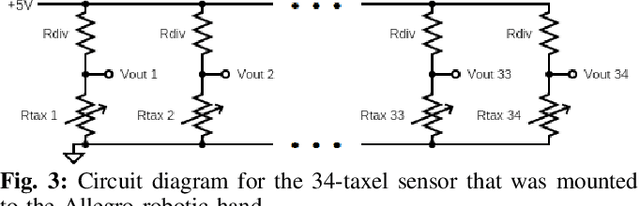
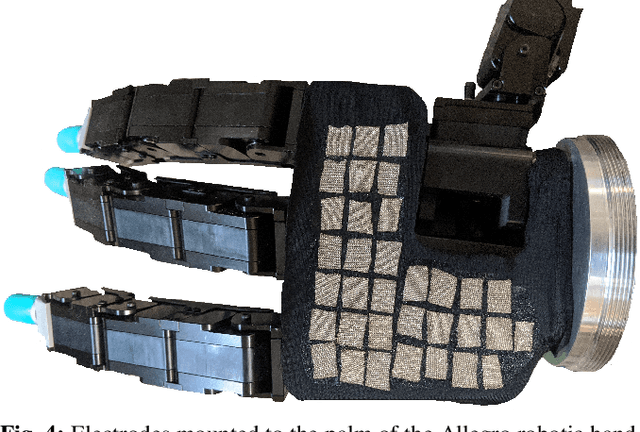
While tactile skins have been shown to be useful for detecting collisions between a robotic arm and its environment, they have not been extensively used for improving robotic grasping and in-hand manipulation. We propose a novel sensor design for use in covering existing multi-fingered robot hands. We analyze the performance of four different piezoresistive materials using both fabric and anti-static foam substrates in benchtop experiments. We find that although the piezoresistive foam was designed as packing material and not for use as a sensing substrate, it performs comparably with fabrics specifically designed for this purpose. While these results demonstrate the potential of piezoresistive foams for tactile sensing applications, they do not fully characterize the efficacy of these sensors for use in robot manipulation. As such, we use a high density foam substrate to develop a scalable tactile skin that can be attached to the palm of a robotic hand. We demonstrate several robotic manipulation tasks using this sensor to show its ability to reliably detect and localize contact, as well as analyze contact patterns during grasping and transport tasks.