 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeliberative Context-Aware Ambient Intelligence System for Assisted Living Homes
Sep 16, 2023Monitoring wellbeing and stress is one of the problems covered by ambient intelligence, as stress is a significant cause of human illnesses directly affecting our emotional state. The primary aim was to propose a deliberation architecture for an ambient intelligence healthcare application. The architecture provides a plan for comforting stressed seniors suffering from negative emotions in an assisted living home and executes the plan considering the environment's dynamic nature. Literature was reviewed to identify the convergence between deliberation and ambient intelligence and the latter's latest healthcare trends. A deliberation function was designed to achieve context-aware dynamic human-robot interaction, perception, planning capabilities, reactivity, and context-awareness with regard to the environment. A number of experimental case studies in a simulated assisted living home scenario were conducted to demonstrate the approach's behavior and validity. The proposed methods were validated to show classification accuracy. The validation showed that the deliberation function has effectively achieved its deliberative objectives.
A context-aware knowledge acquisition for planning applications using ontologies
Apr 19, 2019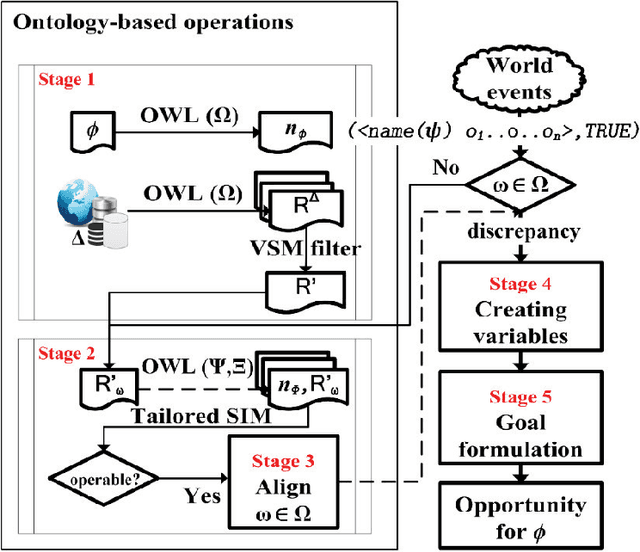
Automated planning technology has developed significantly. Designing a planning model that allows an automated agent to be capable of reacting intelligently to unexpected events in a real execution environment yet remains a challenge. This article describes a domain-independent approach to allow the agent to be context-aware of its execution environment and the task it performs, acquire new information that is guaranteed to be related and more importantly manageable, and integrate such information into its model through the use of ontologies and semantic operations to autonomously formulate new objectives, resulting in a more human-like behaviour for handling unexpected events in the context of opportunities.
* 13 pages, 11 Figures, conference. arXiv admin note: text overlap with arXiv:1904.03606
Extending planning knowledge using ontologies for goal opportunities
Apr 07, 2019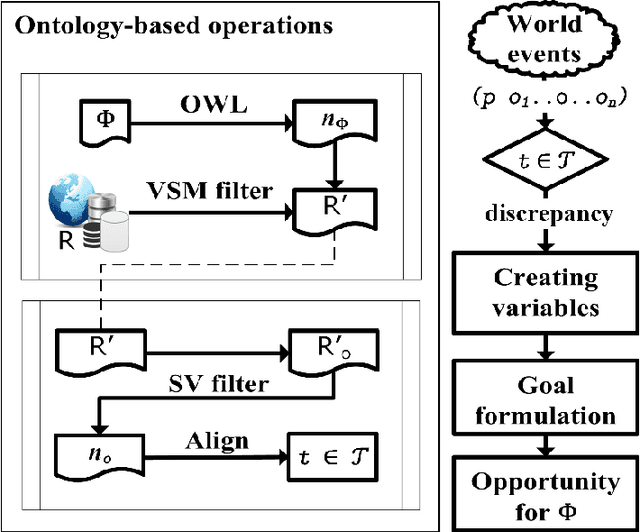
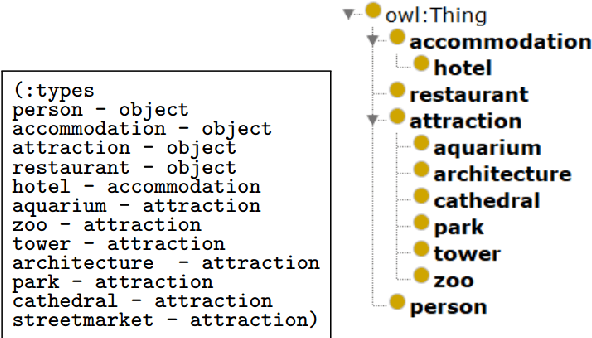
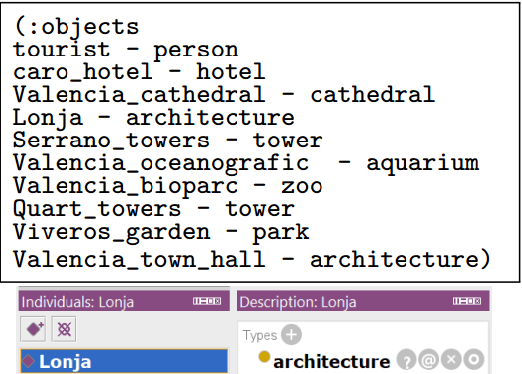
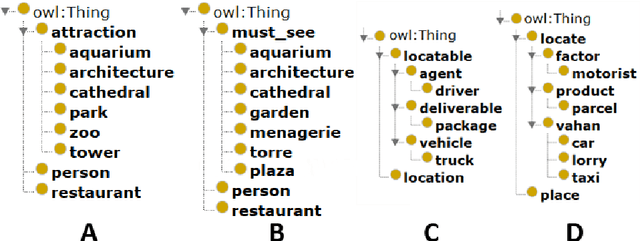
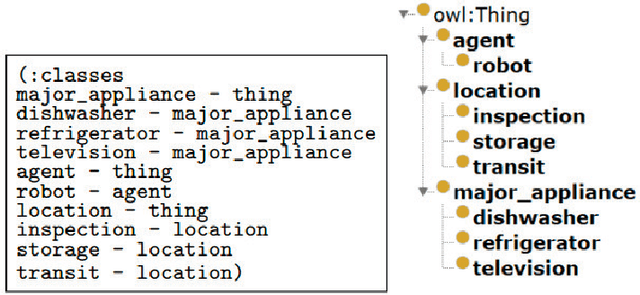
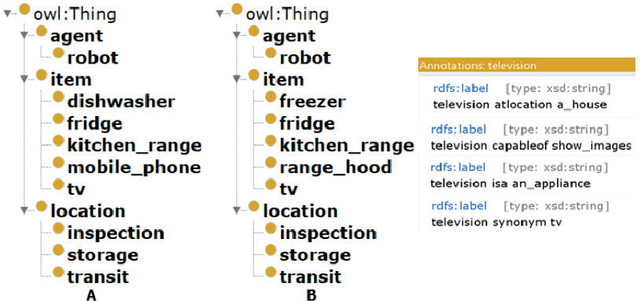
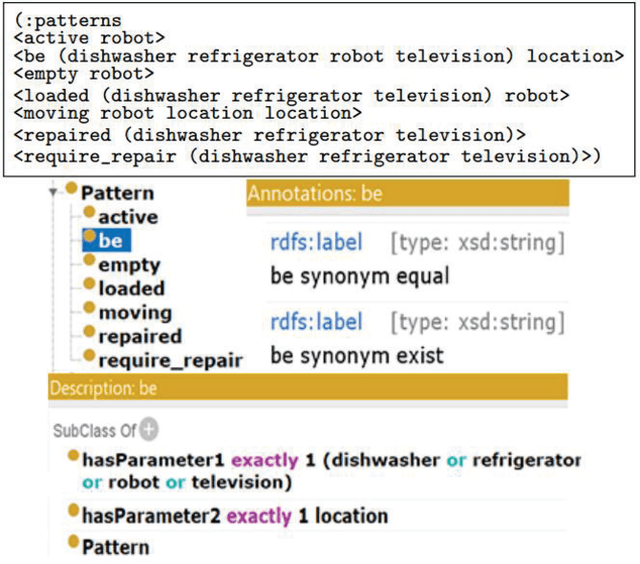
Approaches to goal-directed behaviour including online planning and opportunistic planning tackle a change in the environment by generating alternative goals to avoid failures or seize opportunities. However, current approaches only address unanticipated changes related to objects or object types already defined in the planning task that is being solved. This article describes a domain-independent approach that advances the state of the art by extending the knowledge of a planning task with relevant objects of new types. The approach draws upon the use of ontologies, semantic measures, and ontology alignment to accommodate newly acquired data that trigger the formulation of goal opportunities inducing a better-valued plan.
* 10 pages, 8 Figures, 31st International-Business-Information-Management-Association Conference, Milan ITALY, date: APR 25-26, 2018
Handling PDDL3.0 State Trajectory Constraints with Temporal Landmarks
Jun 26, 2017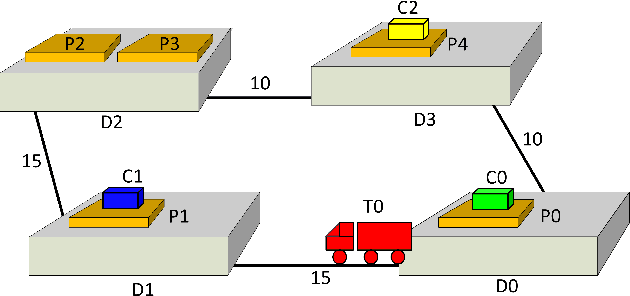
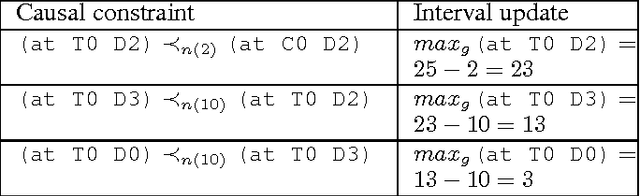
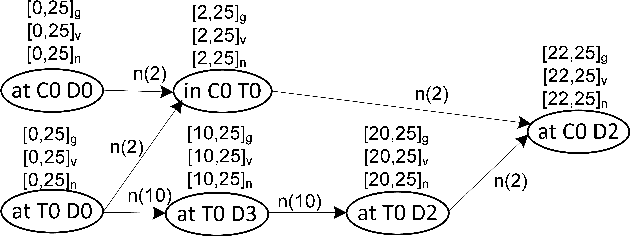
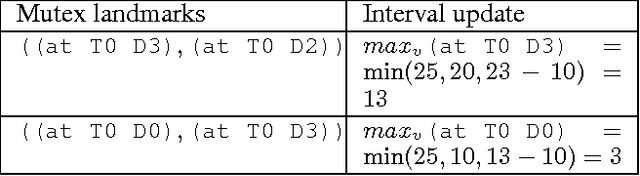
Temporal landmarks have been proved to be a helpful mechanism to deal with temporal planning problems, specifically to improve planners performance and handle problems with deadline constraints. In this paper, we show the strength of using temporal landmarks to handle the state trajectory constraints of PDDL3.0. We analyze the formalism of TempLM, a temporal planner particularly aimed at solving planning problems with deadlines, and we present a detailed study that exploits the underlying temporal landmark-based mechanism of TempLM for representing and reasoning with trajectory constraints.