 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtending planning knowledge using ontologies for goal opportunities
Apr 07, 2019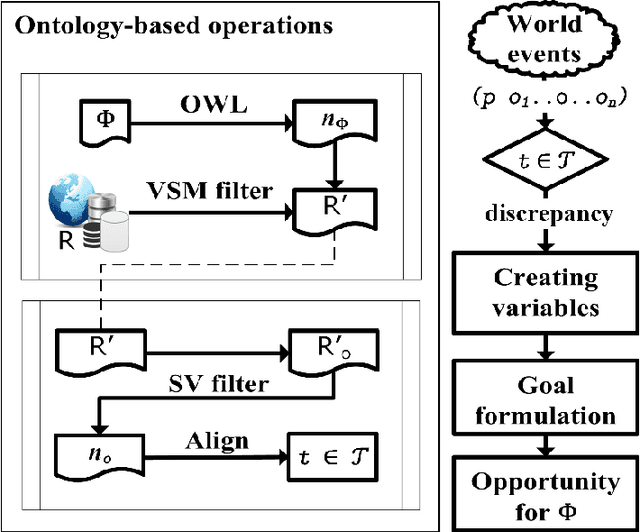
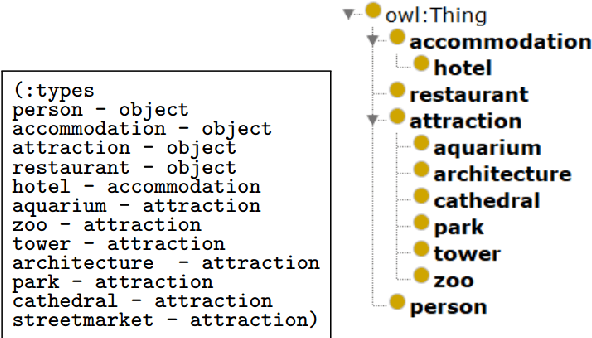
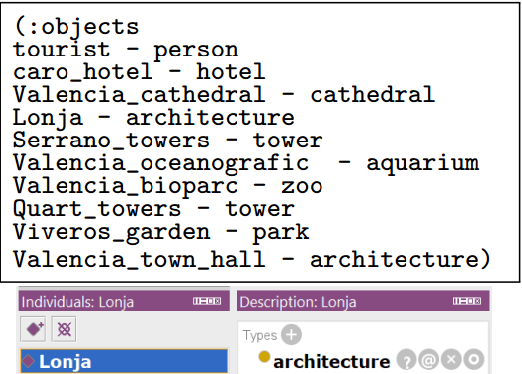
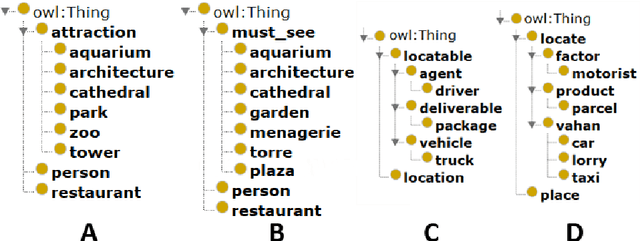
Approaches to goal-directed behaviour including online planning and opportunistic planning tackle a change in the environment by generating alternative goals to avoid failures or seize opportunities. However, current approaches only address unanticipated changes related to objects or object types already defined in the planning task that is being solved. This article describes a domain-independent approach that advances the state of the art by extending the knowledge of a planning task with relevant objects of new types. The approach draws upon the use of ontologies, semantic measures, and ontology alignment to accommodate newly acquired data that trigger the formulation of goal opportunities inducing a better-valued plan.
* 10 pages, 8 Figures, 31st International-Business-Information-Management-Association Conference, Milan ITALY, date: APR 25-26, 2018
Handling PDDL3.0 State Trajectory Constraints with Temporal Landmarks
Jun 26, 2017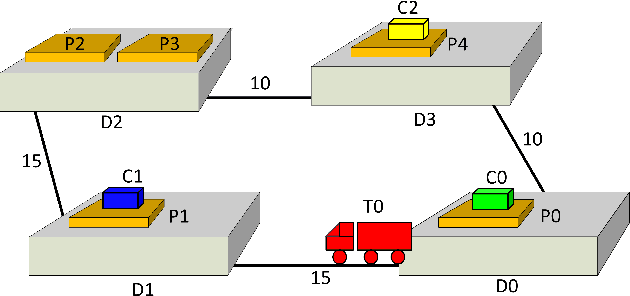
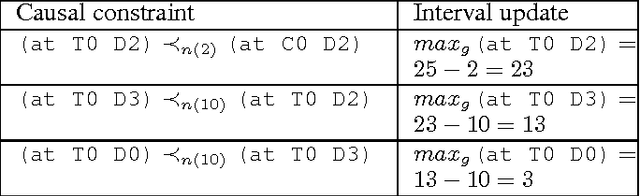
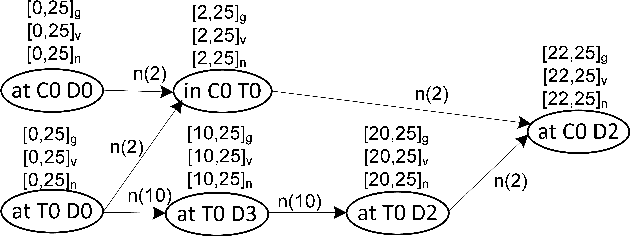
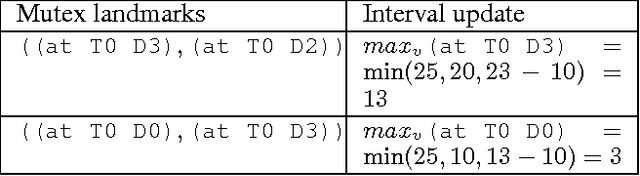
Temporal landmarks have been proved to be a helpful mechanism to deal with temporal planning problems, specifically to improve planners performance and handle problems with deadline constraints. In this paper, we show the strength of using temporal landmarks to handle the state trajectory constraints of PDDL3.0. We analyze the formalism of TempLM, a temporal planner particularly aimed at solving planning problems with deadlines, and we present a detailed study that exploits the underlying temporal landmark-based mechanism of TempLM for representing and reasoning with trajectory constraints.