 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTechnical Report of Mobile Manipulator Robot for Industrial Environments
Sep 10, 2024



This paper presents the development of the Auriga @Work robot, designed by the Robotics and Intelligent Automation Lab at Shahid Beheshti University, Department of Electrical Engineering, for the RoboCup 2024 competition. The robot is tailored for industrial applications, focusing on enhancing efficiency in repetitive or hazardous environments. It is equipped with a 4-wheel Mecanum drive system for omnidirectional mobility and a 5-degree-of-freedom manipulator arm with a custom 3D-printed gripper for object manipulation and navigation tasks. The robot's electronics are powered by custom-designed boards utilizing ESP32 microcontrollers and an Nvidia Jetson Nano for real-time control and decision-making. The key software stack integrates Hector SLAM for mapping, the A* algorithm for path planning, and YOLO for object detection, along with advanced sensor fusion for improved navigation and collision avoidance.
Clustering of Urban Traffic Patterns by K-Means and Dynamic Time Warping: Case Study
Sep 18, 2023
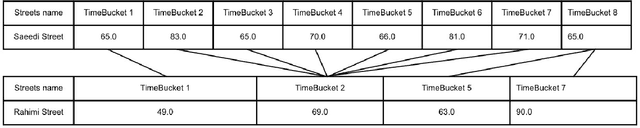
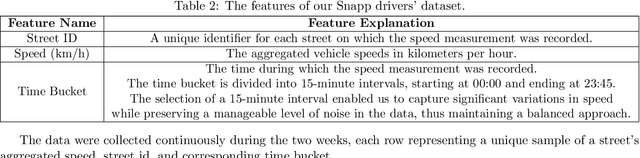
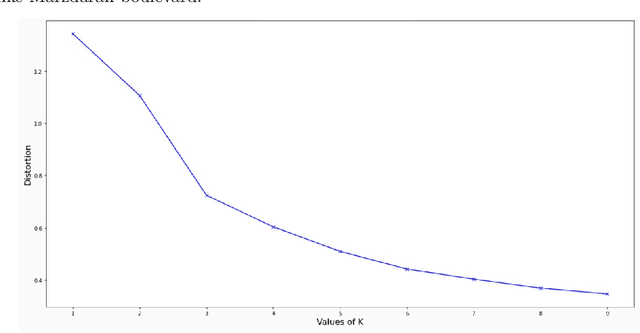
Clustering of urban traffic patterns is an essential task in many different areas of traffic management and planning. In this paper, two significant applications in the clustering of urban traffic patterns are described. The first application estimates the missing speed values using the speed of road segments with similar traffic patterns to colorify map tiles. The second one is the estimation of essential road segments for generating addresses for a local point on the map, using the similarity patterns of different road segments. The speed time series extracts the traffic pattern in different road segments. In this paper, we proposed the time series clustering algorithm based on K-Means and Dynamic Time Warping. The case study of our proposed algorithm is based on the Snapp application's driver speed time series data. The results of the two applications illustrate that the proposed method can extract similar urban traffic patterns.