 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Dynamic Window Assisted Two-stage LSTM Frameworks for Indoor Localization
Sep 01, 2021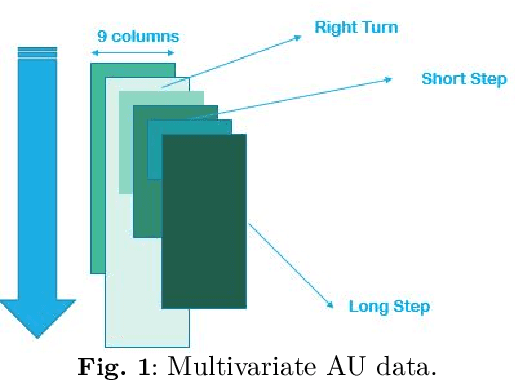
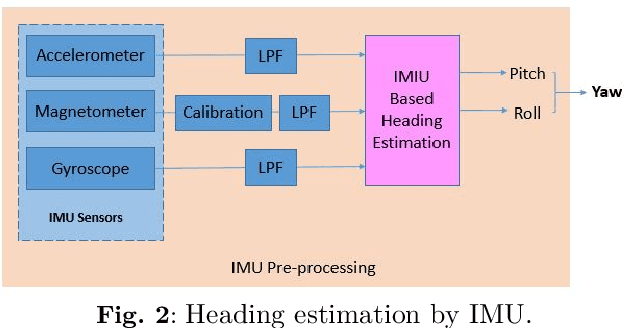
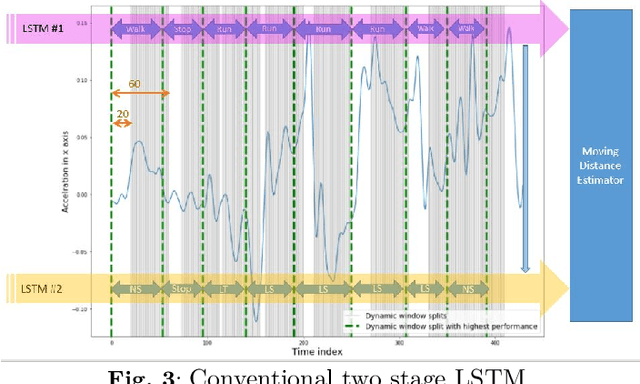
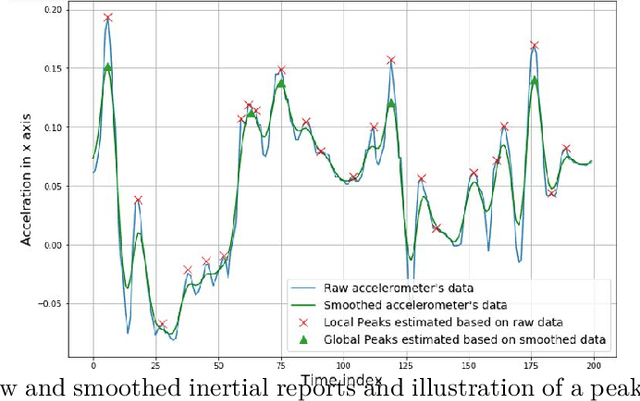
Internet of Things (IoT)-based indoor localization has gained significant popularity recently to satisfy the ever-increasing requirements of indoor Location-based Services (LBS). In this context, Inertial Measurement Unit (IMU)-based localization is of interest as it provides a scalable solution independent of any proprietary sensors/modules. Existing IMU-based methodologies, however, are mainly developed based on statistical heading and step length estimation techniques that suffer from cumulative error issues and have extensive computational time requirements limiting their application for real-time indoor positioning. To address the aforementioned issues, we propose the Online Dynamic Window (ODW)-assisted two-stage Long Short Term Memory (LSTM) localization framework. Three ODWs are proposed, where the first model uses a Natural Language Processing (NLP)-inspired Dynamic Window (DW) approach, which significantly reduces the required computational time. The second framework is developed based on a Signal Processing Dynamic Windowing (SP-DW) approach to further reduce the required processing time of the two-stage LSTM-based model. The third ODW, referred to as the SP-NLP, combines the first two windowing mechanisms to further improve the overall achieved accuracy. Compared to the traditional LSTM-based positioning approaches, which suffer from either high tensor computation requirements or low accuracy, the proposed ODW-assisted models can perform indoor localization in a near-real time fashion with high accuracy. Performances of the proposed ODW-assisted models are evaluated based on a real Pedestrian Dead Reckoning (PDR) dataset. The results illustrate potentials of the proposed ODW-assisted techniques in achieving high classification accuracy with significantly reduced computational time, making them applicable for near real-time implementations.