 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunity Detection with Known, Unknown, or Partially Known Auxiliary Latent Variables
Jan 08, 2023Empirical observations suggest that in practice, community membership does not completely explain the dependency between the edges of an observation graph. The residual dependence of the graph edges are modeled in this paper, to first order, by auxiliary node latent variables that affect the statistics of the graph edges but carry no information about the communities of interest. We then study community detection in graphs obeying the stochastic block model and censored block model with auxiliary latent variables. We analyze the conditions for exact recovery when these auxiliary latent variables are unknown, representing unknown nuisance parameters or model mismatch. We also analyze exact recovery when these secondary latent variables have been either fully or partially revealed. Finally, we propose a semidefinite programming algorithm for recovering the desired labels when the secondary labels are either known or unknown. We show that exact recovery is possible by semidefinite programming down to the respective maximum likelihood exact recovery threshold.
Real-Time EMG Signal Classification via Recurrent Neural Networks
Sep 13, 2021
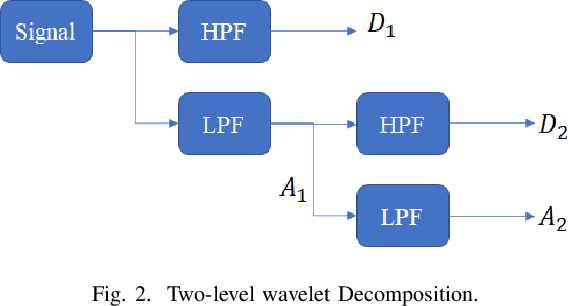
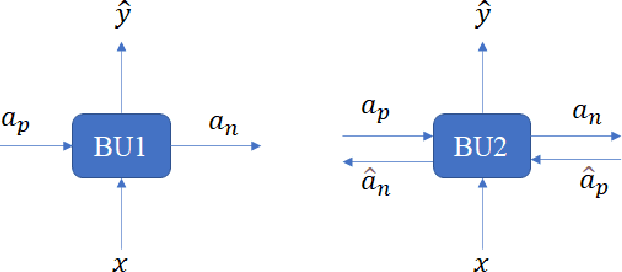
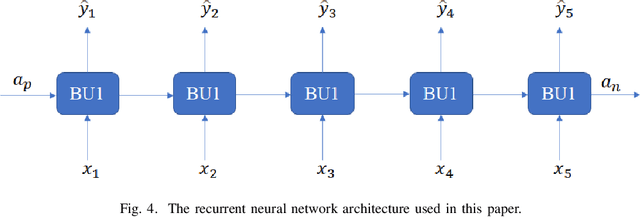
Real-time classification of Electromyography signals is the most challenging part of controlling a prosthetic hand. Achieving a high classification accuracy of EMG signals in a short delay time is still challenging. Recurrent neural networks (RNNs) are artificial neural network architectures that are appropriate for sequential data such as EMG. In this paper, after extracting features from a hybrid time-frequency domain (discrete Wavelet transform), we utilize a set of recurrent neural network-based architectures to increase the classification accuracy and reduce the prediction delay time. The performances of these architectures are compared and in general outperform other state-of-the-art methods by achieving 96% classification accuracy in 600 msec.
EMG-Based Feature Extraction and Classification for Prosthetic Hand Control
Jul 01, 2021
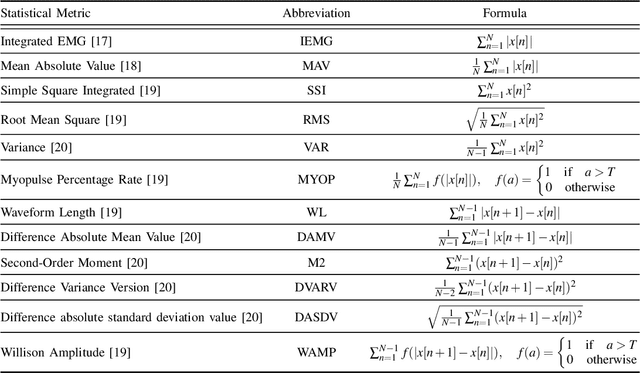

In recent years, real-time control of prosthetic hands has gained a great deal of attention. In particular, real-time analysis of Electromyography (EMG) signals has several challenges to achieve an acceptable accuracy and execution delay. In this paper, we address some of these challenges by improving the accuracy in a shorter signal length. We first introduce a set of new feature extraction functions applying on each level of wavelet decomposition. Then, we propose a postprocessing approach to process the neural network outputs. The experimental results illustrate that the proposed method enhances the accuracy of real-time classification of EMG signals up to $95.5\%$ for $800$ msec signal length. The proposed postprocessing method achieves higher consistency compared with conventional majority voting and Bayesian fusion methods.
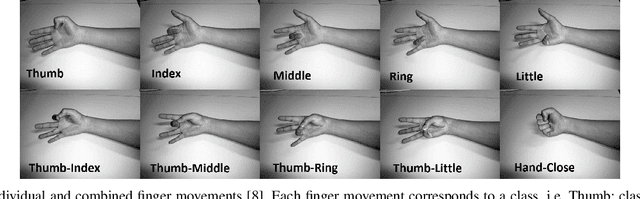
EMG Signal Classification Using Reflection Coefficients and Extreme Value Machine
Jun 19, 2021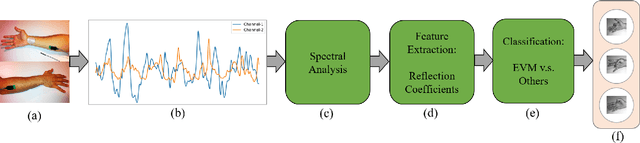
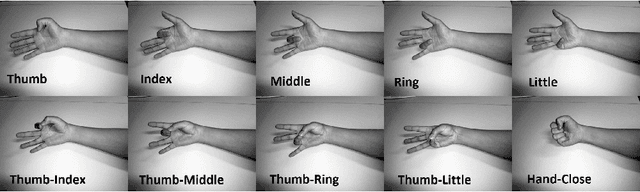
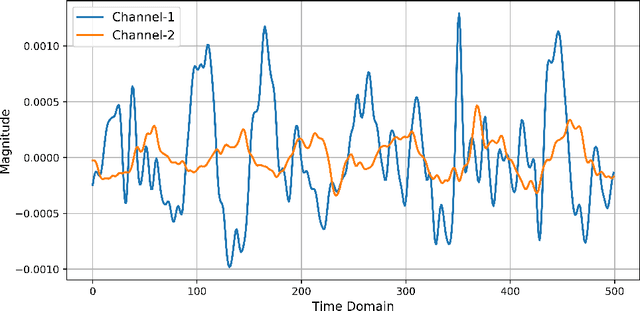
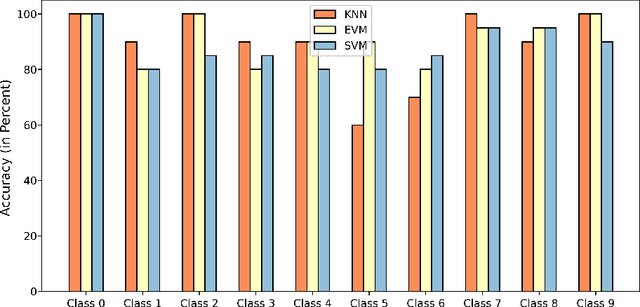
Electromyography is a promising approach to the gesture recognition of humans if an efficient classifier with high accuracy is available. In this paper, we propose to utilize Extreme Value Machine (EVM) as a high-performance algorithm for the classification of EMG signals. We employ reflection coefficients obtained from an Autoregressive (AR) model to train a set of classifiers. Our experimental results indicate that EVM has better accuracy in comparison to the conventional classifiers approved in the literature based on K-Nearest Neighbors (KNN) and Support Vector Machine (SVM).
Semidefinite Programming for Community Detection with Side Information
May 06, 2021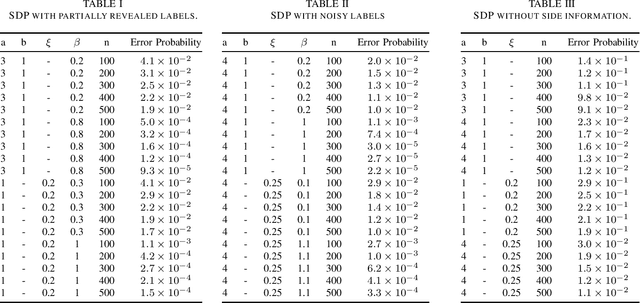
This paper produces an efficient Semidefinite Programming (SDP) solution for community detection that incorporates non-graph data, which in this context is known as side information. SDP is an efficient solution for standard community detection on graphs. We formulate a semi-definite relaxation for the maximum likelihood estimation of node labels, subject to observing both graph and non-graph data. This formulation is distinct from the SDP solution of standard community detection, but maintains its desirable properties. We calculate the exact recovery threshold for three types of non-graph information, which in this paper are called side information: partially revealed labels, noisy labels, as well as multiple observations (features) per node with arbitrary but finite cardinality. We find that SDP has the same exact recovery threshold in the presence of side information as maximum likelihood with side information. Thus, the methods developed herein are computationally efficient as well as asymptotically accurate for the solution of community detection in the presence of side information. Simulations show that the asymptotic results of this paper can also shed light on the performance of SDP for graphs of modest size.
Community Detection: Exact Recovery in Weighted Graphs
Feb 08, 2021
In community detection, the exact recovery of communities (clusters) has been mainly investigated under the general stochastic block model with edges drawn from Bernoulli distributions. This paper considers the exact recovery of communities in a complete graph in which the graph edges are drawn from either a set of Gaussian distributions with community-dependent means and variances, or a set of exponential distributions with community-dependent means. For each case, we introduce a new semi-metric that describes sufficient and necessary conditions of exact recovery. The necessary and sufficient conditions are asymptotically tight. The analysis is also extended to incomplete, fully connected weighted graphs.
New GCNN-Based Architecture for Semi-Supervised Node Classification
Sep 29, 2020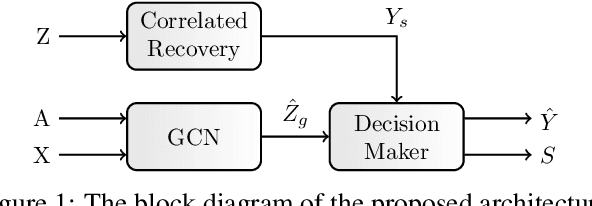
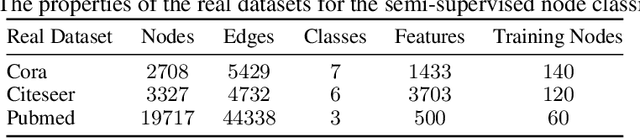

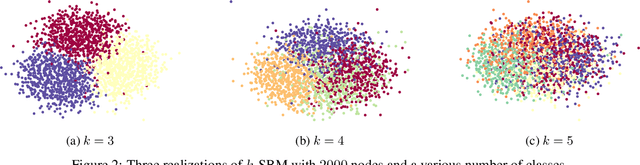
The nodes of a graph existing in a specific cluster are more likely to connect to each other than with other nodes in the graph. Then revealing some information about the nodes, the structure of the graph (the graph edges) provides this opportunity to know more information about the other nodes. From this perspective, this paper revisits the node classification task in a semi-supervised scenario by graph convolutional neural network. The goal is to benefit from the flow of information that circulates around the revealed node labels. For this aim, this paper provides a new graph convolutional neural network architecture. This architecture benefits efficiently from the revealed training nodes, the node features, and the graph structure. On the other hand, in many applications, non-graph observations (side information) exist beside a given graph realization. The non-graph observations are usually independent of the graph structure. This paper shows that the proposed architecture is also powerful in combining a graph realization and independent non-graph observations. For both cases, the experiments on the synthetic and real-world datasets demonstrate that our proposed architecture achieves a higher prediction accuracy in comparison to the existing state-of-the-art methods for the node classification task.