 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimal Footprint Grasping Inspired by Ants
Jan 31, 2026Ants are highly capable of grasping objects in clutter, and we have recently observed that this involves substantial use of their forelegs. The forelegs, more specifically the tarsi, have high friction microstructures (setal pads), are covered in hairs, and have a flexible under-actuated tip. Here we abstract these features to test their functional advantages for a novel low-cost gripper design, suitable for bin-picking applications. In our implementation, the gripper legs are long and slim, with high friction gripping pads, low friction hairs and single-segment tarsus-like structure to mimic the insect's setal pads, hairs, and the tarsi's interactive compliance. Experimental evaluation shows this design is highly robust for grasping a wide variety of individual consumer objects, with all grasp attempts successful. In addition, we demonstrate this design is effective for picking single objects from dense clutter, a task at which ants also show high competence. The work advances grasping technology and shed new light on the mechanical importance of hairy structures and tarsal flexibility in insects.
A Strawberry Harvesting Tool with Minimal Footprint
Jul 28, 2025



In this paper, a novel prototype for harvesting table-top grown strawberries is presented, that is minimalist in its footprint interacting with the fruit. In our methodology, a smooth trapper manipulates the stem into a precise groove location at which a distant laser beam is focused. The tool reaches temperatures as high as 188{\deg} Celsius and as such killing germs and preventing the spread of local plant diseases. The burnt stem wound preserves water content and in turn the fruit shelf life. Cycle and cut times achieved are 5.56 and 2.88 seconds respectively in successful in-door harvesting demonstration. Extensive experiments are performed to optimize the laser spot diameter and lateral speed against the cutting time.
RoboPainter -- a conceptual towards robotized interior finishes
Dec 16, 2023



High demand for painters is required nowadays and foreseen in the near future for both developed and developing countries. To satisfy such demand, this paper presents the detailed computer aided design (CAD) model of a fully functional wall painting robot for interior finishes. The RoboPainter is capable of performing full scale wall-ceil painting in addition to decorative wall drawings. The 8 degrees of freedom (DOF) mobile robot structure consists of a 6DOF spray painting arm mounted on a 2DOF differentially driven mobile base. The design presented endows several achievements in terms of total robot mass and painting rate as compared to existing literature. Detailed dynamic model parameters are presented to allow for further enhancement in terms of robot motion control.
Laser Powered Harvesting System for Table-Top Grown Strawberries
Dec 13, 2023



In this paper, a novel tool prototype for harvesting table-top grown strawberries is presented. With robustness against strawberry localization error of 15mm and average cycle time of 8.02 seconds at 50% of maximum operational velocity, it provides a promising contribution towards full automation of strawberry harvesting. In addition, the tool has an overall fruit-interacting width of 35mm that greatly enhances reach-ability due to the minimal footprint. A complete harvesting system is also proposed that can be readily mounted to a mobile platform for field tests. An experimental demonstration is performed to showcase the new methodology and derive relevant metrics.
AntGrip -- Boosting Parallel Plate Gripper Performance Inspired by the Internal Hairs of Ant Mandibles
Dec 08, 2023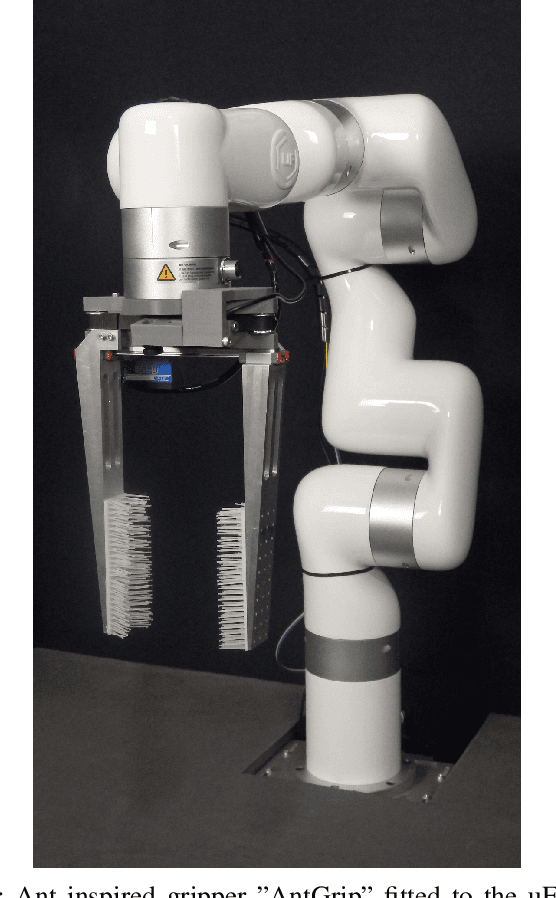
Ants use their mandibles - effectively a two-finger gripper - for a wide range of grasping activities. Here we investigate whether mimicking the internal hairs found on ant mandibles can improve performance of a two-finger parallel plate robot gripper. With bin picking applications in mind, the gripper fingers are long and slim, with interchangeable soft gripping pads that can be hairy or hairless. A total of 2400 video-documented experiments have been conducted, comparing hairless to hairy pads with different hair patterns. Simply by adding hairs, the grasp success rate was increased by at least 29%, and the number of objects that remain securely gripped during manipulation more than doubled. This result not only advances the state of the art in grasping technology, but also provides novel insight into the mechanical role of mandible hairs in ant biology.