 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-end sensor modeling for LiDAR Point Cloud
Jul 17, 2019

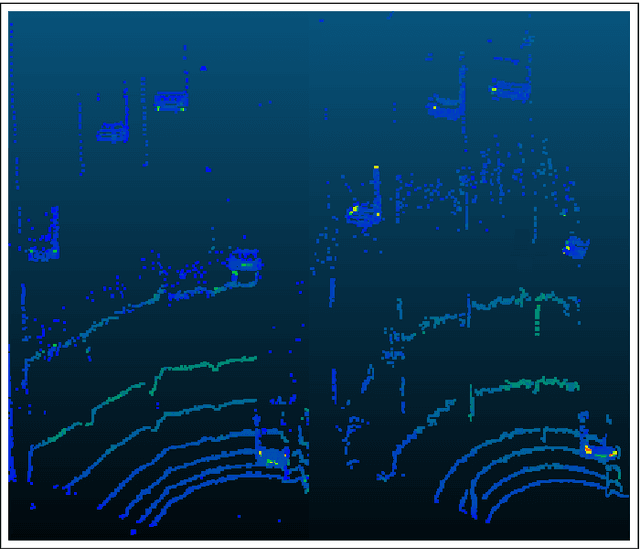

Advanced sensors are a key to enable self-driving cars technology. Laser scanner sensors (LiDAR, Light Detection And Ranging) became a fundamental choice due to its long-range and robustness to low light driving conditions. The problem of designing a control software for self-driving cars is a complex task to explicitly formulate in rule-based systems, thus recent approaches rely on machine learning that can learn those rules from data. The major problem with such approaches is that the amount of training data required for generalizing a machine learning model is big, and on the other hand LiDAR data annotation is very costly compared to other car sensors. An accurate LiDAR sensor model can cope with such problem. Moreover, its value goes beyond this because existing LiDAR development, validation, and evaluation platforms and processes are very costly, and virtual testing and development environments are still immature in terms of physical properties representation. In this work we propose a novel Deep Learning-based LiDAR sensor model. This method models the sensor echos, using a Deep Neural Network to model echo pulse widths learned from real data using Polar Grid Maps (PGM). We benchmark our model performance against comprehensive real sensor data and very promising results are achieved that sets a baseline for future works.