 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCone-Beam CT Image Quality Enhancement Using A Latent Diffusion Model Trained with Simulated CBCT Artifacts
Mar 27, 2026Cone-beam computed tomography (CBCT) images are problematic in clinical medicine because of their low contrast and high artifact content compared with conventional CT images. Although there are some studies to improve image quality, in regions subject to organ deformation, the anatomical structure may change after such image quality improvement. In this study, we propose an overcorrection-free CBCT image quality enhancement method based on a conditional latent diffusion model using pseudo-CBCT images. Pseudo-CBCT images are created from CT images using a simple method that simulates CBCT artifacts and are spatially consistent with the CT images. By performing self-supervised learning with these spatially consistent paired images, we can improve image quality while maintaining anatomical structures. Furthermore, extending the framework of the conditional diffusion model to latent space improves the efficiency of image processing. Our model was trained on pelvic CT-pseudo-CBCT paired data and was applied to both pseudo-CBCT and real CBCT data. The experimental results using data of 75 cases show that with our proposed method, the structural changes were less than 1/1000th (in terms of the number of pixels) of those of a conventional method involving learning with real images, and the correlation coefficient between the CT value distributions of the generated and reference images was 0.916, approaching the same level as conventional methods. We also confirmed that the proposed framework achieves faster processing and superior improvement performance compared with the framework of a conditional diffusion model, even under constrained training settings.
Limited-Angle CT Reconstruction Using Multi-Volume Latent Consistency Model
Mar 05, 2026Limited-angle computed tomography (LACT) reconstruction is an inverse problem with severe ill-posedness arising from missing projection angles, and it is difficult to restore high-precision images without sufficient prior knowledge. In recent years, machine learning methods represented by diffusion models have demonstrated high image generation capabilities. However, accurate restoration of three-dimensional structures of organs and vessels and preservation of contrast remain challenges, and the impact of differences in diverse clinical imaging conditions such as field of view (FOV) and projection angle range on reconstruction accuracy has not been sufficiently investigated. In this study, we propose a multi-volume latent diffusion model that uses three-dimensional latent representations obtained from multiple effective fields of view as guidance for LACT reconstruction in clinical practical problems. The proposed method achieves fast and stable inference by introducing consistency models into latent space, and enables high-precision preservation of organ boundary information and internal structures under different FOV conditions through a Multi-volume encoder that acquires latent variables from different scales of the global region and central region. The evaluation experiments demonstrated that the proposed method achieved high-precision synthetic CT image generation compared to existing methods. Under the limited-angle condition of 60 degrees, MAE of 10.12 HU and SSIM of 0.9677 were achieved, and under the extreme limited-angle condition of 30 degrees, MAE of 16.69 HU and SSIM of 0.9393 were achieved. Furthermore, stable reconstruction performance was demonstrated even for unknown projection angle conditions not included during training, confirming the applicability to diverse imaging conditions in clinical practice.
Construction of an Organ Shape Atlas Using a Hierarchical Mesh Variational Autoencoder
Jun 18, 2025



An organ shape atlas, which represents the shape and position of the organs and skeleton of a living body using a small number of parameters, is expected to have a wide range of clinical applications, including intraoperative guidance and radiotherapy. Because the shape and position of soft organs vary greatly among patients, it is difficult for linear models to reconstruct shapes that have large local variations. Because it is difficult for conventional nonlinear models to control and interpret the organ shapes obtained, deep learning has been attracting attention in three-dimensional shape representation. In this study, we propose an organ shape atlas based on a mesh variational autoencoder (MeshVAE) with hierarchical latent variables. To represent the complex shapes of biological organs and nonlinear shape differences between individuals, the proposed method maintains the performance of organ shape reconstruction by hierarchizing latent variables and enables shape representation using lower-dimensional latent variables. Additionally, templates that define vertex correspondence between different resolutions enable hierarchical representation in mesh data and control the global and local features of the organ shape. We trained the model using liver and stomach organ meshes obtained from 124 cases and confirmed that the model reconstructed the position and shape with an average distance between vertices of 1.5 mm and mean distance of 0.7 mm for the liver shape, and an average distance between vertices of 1.4 mm and mean distance of 0.8 mm for the stomach shape on test data from 19 of cases. The proposed method continuously represented interpolated shapes, and by changing latent variables at different hierarchical levels, the proposed method hierarchically separated shape features compared with PCA.
2D/3D Deep Image Registration by Learning 3D Displacement Fields for Abdominal Organs
Dec 11, 2022Deformable registration of two-dimensional/three-dimensional (2D/3D) images of abdominal organs is a complicated task because the abdominal organs deform significantly and their contours are not detected in two-dimensional X-ray images. We propose a supervised deep learning framework that achieves 2D/3D deformable image registration between 3D volumes and single-viewpoint 2D projected images. The proposed method learns the translation from the target 2D projection images and the initial 3D volume to 3D displacement fields. In experiments, we registered 3D-computed tomography (CT) volumes to digitally reconstructed radiographs generated from abdominal 4D-CT volumes. For validation, we used 4D-CT volumes of 35 cases and confirmed that the 3D-CT volumes reflecting the nonlinear and local respiratory organ displacement were reconstructed. The proposed method demonstrate the compatible performance to the conventional methods with a dice similarity coefficient of 91.6 \% for the liver region and 85.9 \% for the stomach region, while estimating a significantly more accurate CT values.
Feedback Assisted Adversarial Learning to Improve the Quality of Cone-beam CT Images
Oct 23, 2022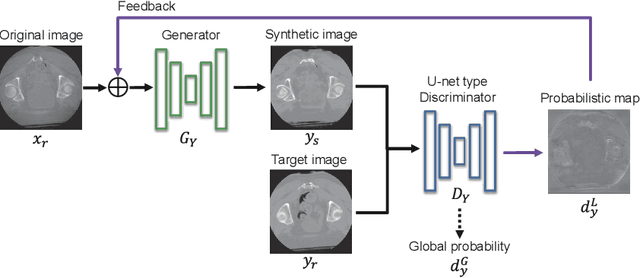

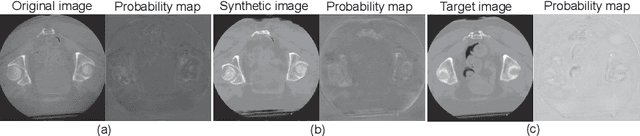
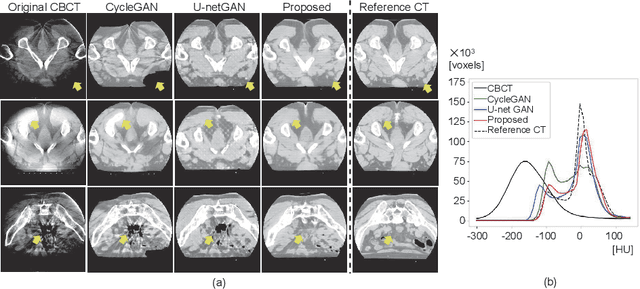
Unsupervised image translation using adversarial learning has been attracting attention to improve the image quality of medical images. However, adversarial training based on the global evaluation values of discriminators does not provide sufficient translation performance for locally different image features. We propose adversarial learning with a feedback mechanism from a discriminator to improve the quality of CBCT images. This framework employs U-net as the discriminator and outputs a probability map representing the local discrimination results. The probability map is fed back to the generator and used for training to improve the image translation. Our experiments using 76 corresponding CT-CBCT images confirmed that the proposed framework could capture more diverse image features than conventional adversarial learning frameworks and produced synthetic images with pixel values close to the reference image and a correlation coefficient of 0.93.
IGCN: Image-to-graph Convolutional Network for 2D/3D Deformable Registration
Oct 31, 2021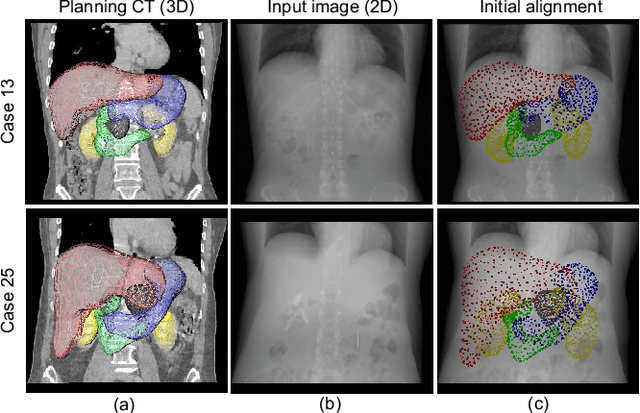
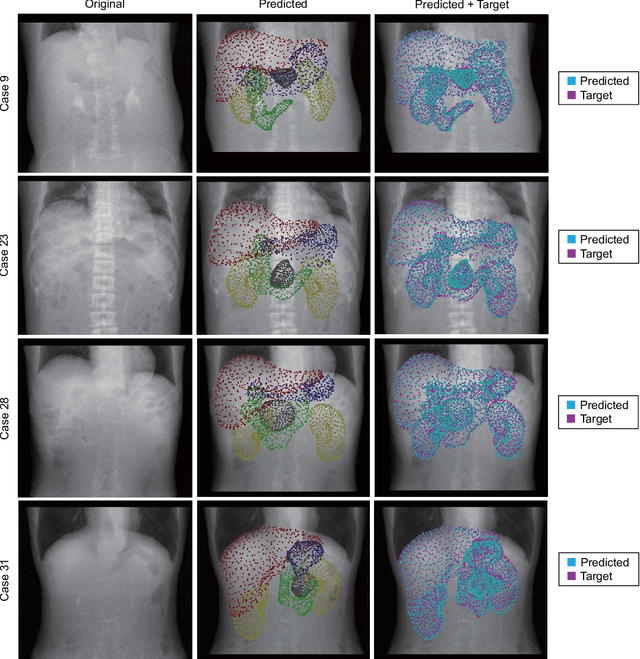
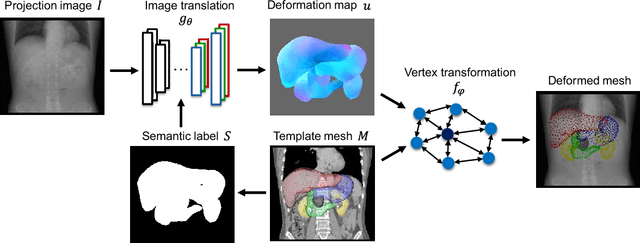
Organ shape reconstruction based on a single-projection image during treatment has wide clinical scope, e.g., in image-guided radiotherapy and surgical guidance. We propose an image-to-graph convolutional network that achieves deformable registration of a 3D organ mesh for a single-viewpoint 2D projection image. This framework enables simultaneous training of two types of transformation: from the 2D projection image to a displacement map, and from the sampled per-vertex feature to a 3D displacement that satisfies the geometrical constraint of the mesh structure. Assuming application to radiation therapy, the 2D/3D deformable registration performance is verified for multiple abdominal organs that have not been targeted to date, i.e., the liver, stomach, duodenum, and kidney, and for pancreatic cancer. The experimental results show shape prediction considering relationships among multiple organs can be used to predict respiratory motion and deformation from digitally reconstructed radiographs with clinically acceptable accuracy.
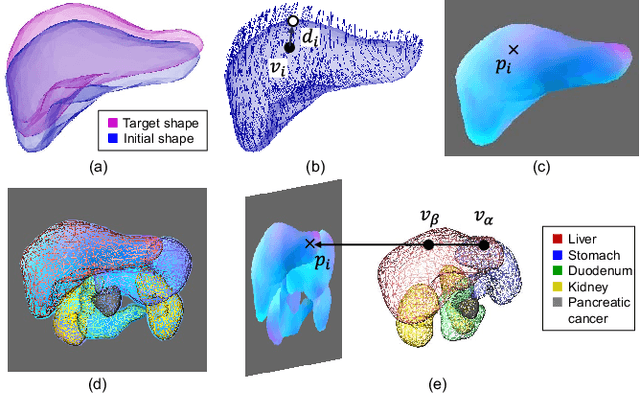
Statistical Deformation Reconstruction Using Multi-organ Shape Features for Pancreatic Cancer Localization
Nov 13, 2019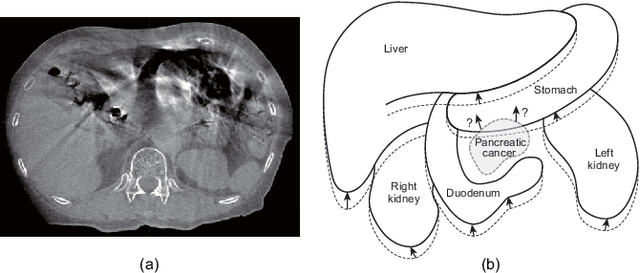
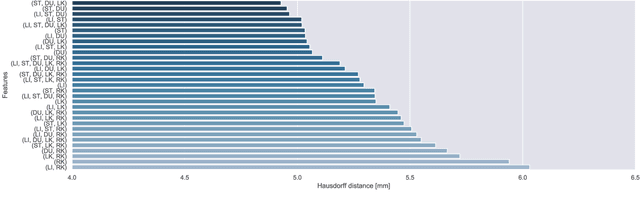
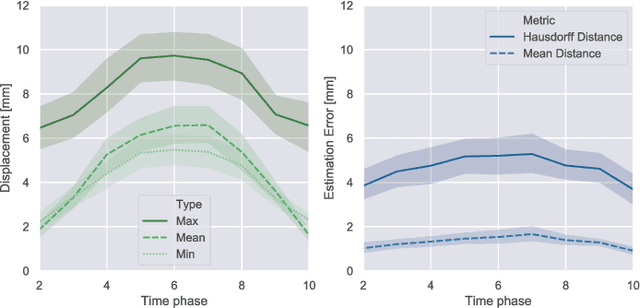
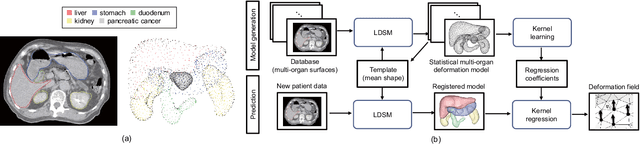
Respiratory motion and the associated deformations of abdominal organs and tumors are essential information in clinical applications. However, inter- and intra-patient multi-organ deformations are complex and have not been statistically formulated, whereas single organ deformations have been widely studied. In this paper, we introduce a multi-organ deformation library and its application to deformation reconstruction based on the shape features of multiple abdominal organs. Statistical multi-organ motion/deformation models of the stomach, liver, left and right kidneys, and duodenum were generated by shape matching their region labels defined on four-dimensional computed tomography images. A total of 250 volumes were measured from 25 pancreatic cancer patients. This paper also proposes a per-region-based deformation learning using the reproducing kernel to predict the displacement of pancreatic cancer for adaptive radiotherapy. The experimental results show that the proposed concept estimates deformations better than general per-patient-based learning models and achieves a clinically acceptable estimation error with a mean distance of 1.2 $\pm$ 0.7 mm and a Hausdorff distance of 4.2 $\pm$ 2.3 mm throughout the respiratory motion.