 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Case Study on the Application of Digital Twins for Enhancing CPS Operations
May 07, 2025To ensure the availability and reduce the downtime of complex cyber-physical systems across different domains, e.g., agriculture and manufacturing, fault tolerance mechanisms are implemented which are complex in both their development and operation. In addition, cyber-physical systems are often confronted with limited hardware resources or are legacy systems, both often hindering the addition of new functionalities directly on the onboard hardware. Digital Twins can be adopted to offload expensive computations, as well as providing support through fault tolerance mechanisms, thus decreasing costs and operational downtime of cyber-physical systems. In this paper, we show the feasibility of a Digital Twin used for enhancing cyber-physical system operations, specifically through functional augmentation and increased fault tolerance, in an industry-oriented use case.
* In Proceedings ASQAP 2025, arXiv:2505.02873
Identifying Uncertainty in Self-Adaptive Robotics with Large Language Models
Apr 29, 2025Future self-adaptive robots are expected to operate in highly dynamic environments while effectively managing uncertainties. However, identifying the sources and impacts of uncertainties in such robotic systems and defining appropriate mitigation strategies is challenging due to the inherent complexity of self-adaptive robots and the lack of comprehensive knowledge about the various factors influencing uncertainty. Hence, practitioners often rely on intuition and past experiences from similar systems to address uncertainties. In this article, we evaluate the potential of large language models (LLMs) in enabling a systematic and automated approach to identify uncertainties in self-adaptive robotics throughout the software engineering lifecycle. For this evaluation, we analyzed 10 advanced LLMs with varying capabilities across four industrial-sized robotics case studies, gathering the practitioners' perspectives on the LLM-generated responses related to uncertainties. Results showed that practitioners agreed with 63-88% of the LLM responses and expressed strong interest in the practicality of LLMs for this purpose.
Digital Twin Enabled Runtime Verification for Autonomous Mobile Robots under Uncertainty
Dec 13, 2024As autonomous robots increasingly navigate complex and unpredictable environments, ensuring their reliable behavior under uncertainty becomes a critical challenge. This paper introduces a digital twin-based runtime verification for an autonomous mobile robot to mitigate the impact posed by uncertainty in the deployment environment. The safety and performance properties are specified and synthesized as runtime monitors using TeSSLa. The integration of the executable digital twin, via the MQTT protocol, enables continuous monitoring and validation of the robot's behavior in real-time. We explore the sources of uncertainties, including sensor noise and environment variations, and analyze their impact on the robot safety and performance. Equipped with high computation resources, the cloud-located digital twin serves as a watch-dog model to estimate the actual state, check the consistency of the robot's actuations and intervene to override such actuations if a safety or performance property is about to be violated. The experimental analysis demonstrated high efficiency of the proposed approach in ensuring the reliability and robustness of the autonomous robot behavior in uncertain environments and securing high alignment between the actual and expected speeds where the difference is reduced by up to 41\% compared to the default robot navigation control.
RMQFMU: Bridging the Real World with Co-simulation Technical Report
Jul 08, 2021

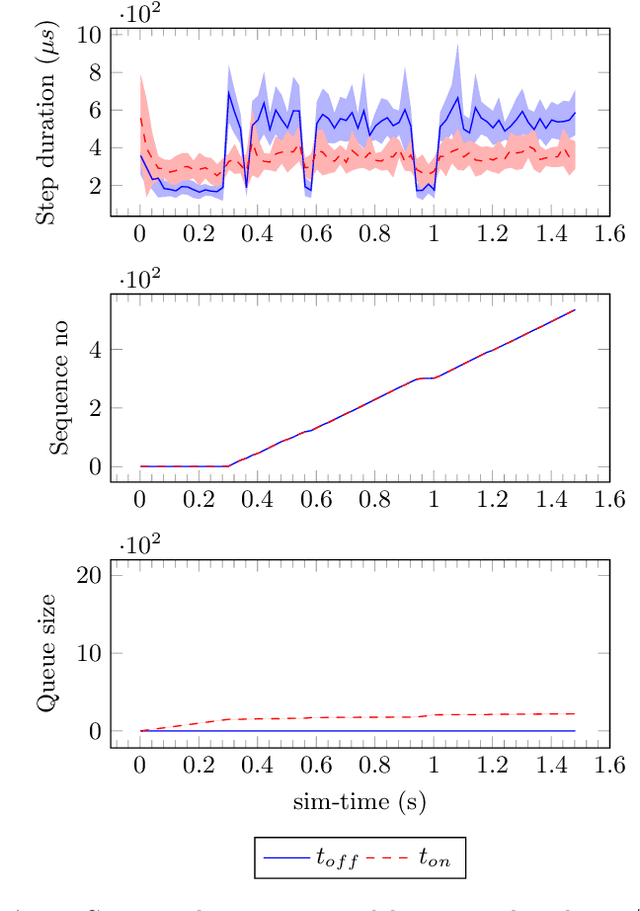
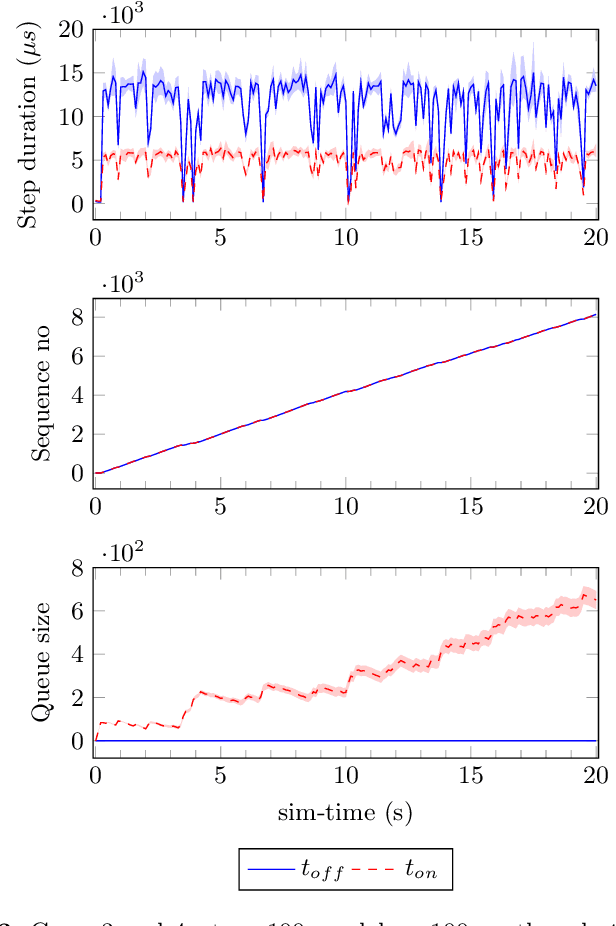
In this paper we present an experience report for the RMQFMU, a plug and play tool, that enables feeding data to/from an FMI2-based co-simulation environment based on the AMQP protocol. Bridging the co-simulation to an external environment allows on one side to feed historical data to the co-simulation, serving different purposes, such as visualisation and/or data analysis. On the other side, such a tool facilitates the realisation of the digital twin concept by coupling co-simulation and hardware/robots close to real-time. In the paper we present limitations of the initial version of the RMQFMU with respect to the capability of bridging co-simulation with the real world. To provide the desired functionality of the tool, we present in a step-by-step fashion how these limitations, and subsequent limitations, are alleviated. We perform various experiments in order to give reason to the modifications carried out. Finally, we report on two case-studies where we have adopted the RMQFMU, and provide guidelines meant to aid practitioners in its use.
Ethical AI-Powered Regression Test Selection
Jun 30, 2021
Test automation is common in software development; often one tests repeatedly to identify regressions. If the amount of test cases is large, one may select a subset and only use the most important test cases. The regression test selection (RTS) could be automated and enhanced with Artificial Intelligence (AI-RTS). This however could introduce ethical challenges. While such challenges in AI are in general well studied, there is a gap with respect to ethical AI-RTS. By exploring the literature and learning from our experiences of developing an industry AI-RTS tool, we contribute to the literature by identifying three challenges (assigning responsibility, bias in decision-making and lack of participation) and three approaches (explicability, supervision and diversity). Additionally, we provide a checklist for ethical AI-RTS to help guide the decision-making of the stakeholders involved in the process.