 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Grid-based Sensor Floor Platform for Robot Localization using Machine Learning
Dec 09, 2022Wireless Sensor Network (WSN) applications reshape the trend of warehouse monitoring systems allowing them to track and locate massive numbers of logistic entities in real-time. To support the tasks, classic Radio Frequency (RF)-based localization approaches (e.g. triangulation and trilateration) confront challenges due to multi-path fading and signal loss in noisy warehouse environment. In this paper, we investigate machine learning methods using a new grid-based WSN platform called Sensor Floor that can overcome the issues. Sensor Floor consists of 345 nodes installed across the floor of our logistic research hall with dual-band RF and Inertial Measurement Unit (IMU) sensors. Our goal is to localize all logistic entities, for this study we use a mobile robot. We record distributed sensing measurements of Received Signal Strength Indicator (RSSI) and IMU values as the dataset and position tracking from Vicon system as the ground truth. The asynchronous collected data is pre-processed and trained using Random Forest and Convolutional Neural Network (CNN). The CNN model with regularization outperforms the Random Forest in terms of localization accuracy with aproximate 15 cm. Moreover, the CNN architecture can be configured flexibly depending on the scenario in the warehouse. The hardware, software and the CNN architecture of the Sensor Floor are open-source under https://github.com/FLW-TUDO/sensorfloor.
Combining Maximum-Likelihood with Deep Learning for Event Reconstruction in IceCube
Jul 26, 2021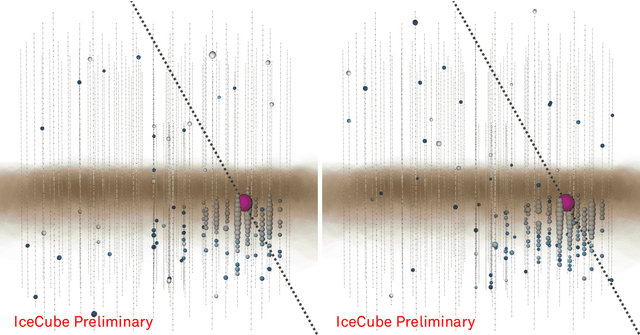
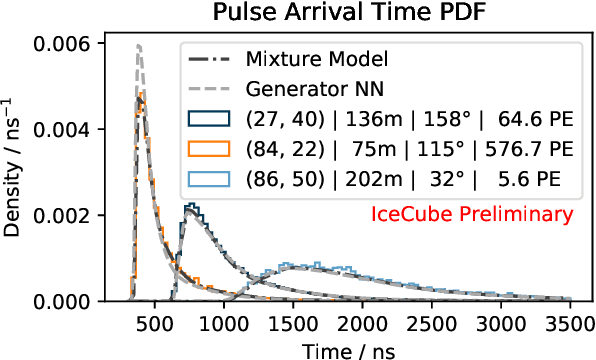
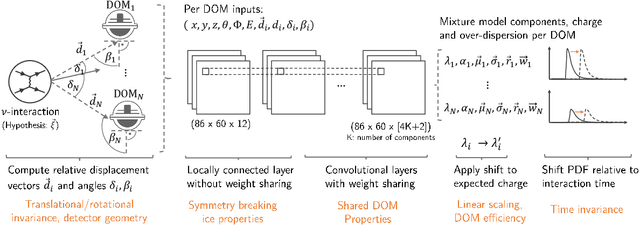
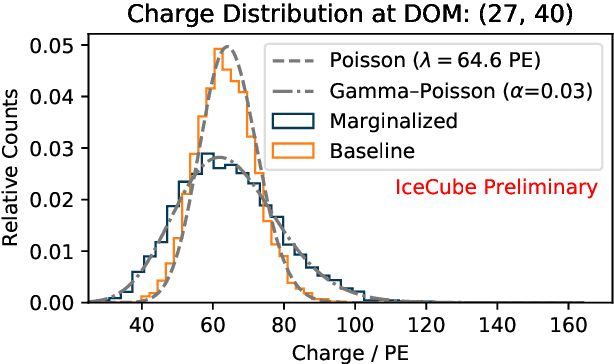
The field of deep learning has become increasingly important for particle physics experiments, yielding a multitude of advances, predominantly in event classification and reconstruction tasks. Many of these applications have been adopted from other domains. However, data in the field of physics are unique in the context of machine learning, insofar as their generation process and the laws and symmetries they abide by are usually well understood. Most commonly used deep learning architectures fail at utilizing this available information. In contrast, more traditional likelihood-based methods are capable of exploiting domain knowledge, but they are often limited by computational complexity. In this contribution, a hybrid approach is presented that utilizes generative neural networks to approximate the likelihood, which may then be used in a traditional maximum-likelihood setting. Domain knowledge, such as invariances and detector characteristics, can easily be incorporated in this approach. The hybrid approach is illustrated by the example of event reconstruction in IceCube.