 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Driven Multi-Scale Feature Fusion Network for Real-time Image Deraining
Jul 19, 2023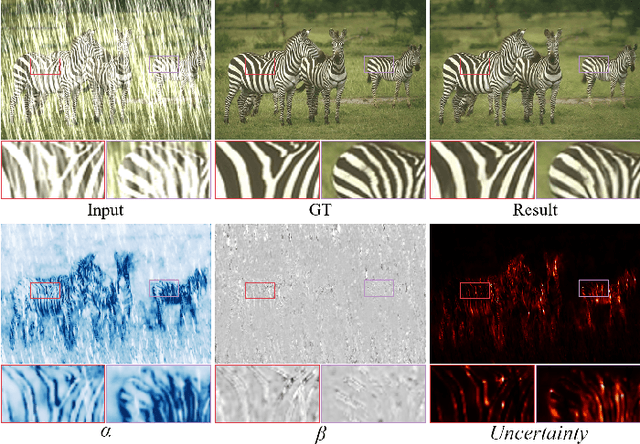
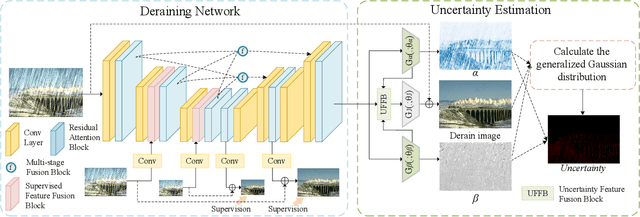
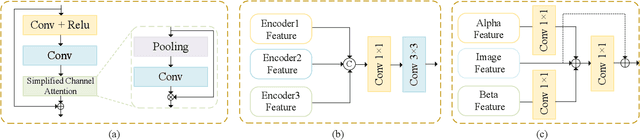
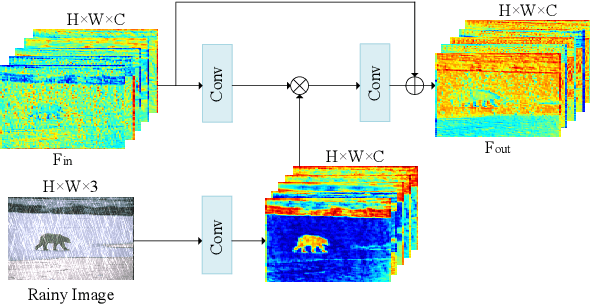
Visual-based measurement systems are frequently affected by rainy weather due to the degradation caused by rain streaks in captured images, and existing imaging devices struggle to address this issue in real-time. While most efforts leverage deep networks for image deraining and have made progress, their large parameter sizes hinder deployment on resource-constrained devices. Additionally, these data-driven models often produce deterministic results, without considering their inherent epistemic uncertainty, which can lead to undesired reconstruction errors. Well-calibrated uncertainty can help alleviate prediction errors and assist measurement devices in mitigating risks and improving usability. Therefore, we propose an Uncertainty-Driven Multi-Scale Feature Fusion Network (UMFFNet) that learns the probability mapping distribution between paired images to estimate uncertainty. Specifically, we introduce an uncertainty feature fusion block (UFFB) that utilizes uncertainty information to dynamically enhance acquired features and focus on blurry regions obscured by rain streaks, reducing prediction errors. In addition, to further boost the performance of UMFFNet, we fused feature information from multiple scales to guide the network for efficient collaborative rain removal. Extensive experiments demonstrate that UMFFNet achieves significant performance improvements with few parameters, surpassing state-of-the-art image deraining methods.
Semi-UFormer: Semi-supervised Uncertainty-aware Transformer for Image Dehazing
Oct 28, 2022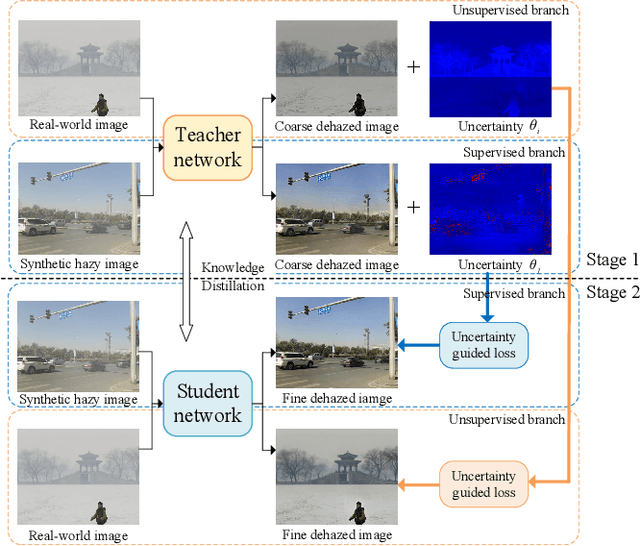
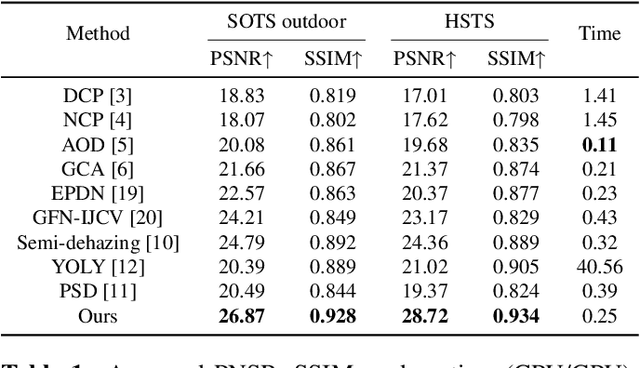
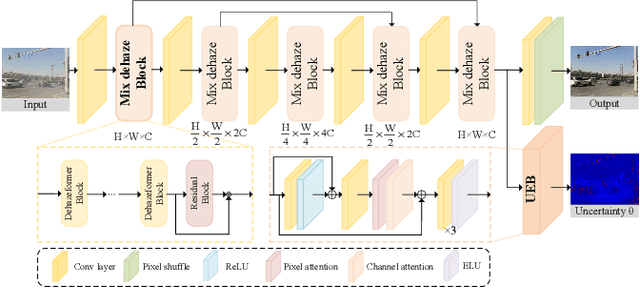
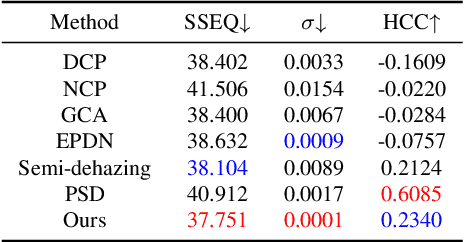
Image dehazing is fundamental yet not well-solved in computer vision. Most cutting-edge models are trained in synthetic data, leading to the poor performance on real-world hazy scenarios. Besides, they commonly give deterministic dehazed images while neglecting to mine their uncertainty. To bridge the domain gap and enhance the dehazing performance, we propose a novel semi-supervised uncertainty-aware transformer network, called Semi-UFormer. Semi-UFormer can well leverage both the real-world hazy images and their uncertainty guidance information. Specifically, Semi-UFormer builds itself on the knowledge distillation framework. Such teacher-student networks effectively absorb real-world haze information for quality dehazing. Furthermore, an uncertainty estimation block is introduced into the model to estimate the pixel uncertainty representations, which is then used as a guidance signal to help the student network produce haze-free images more accurately. Extensive experiments demonstrate that Semi-UFormer generalizes well from synthetic to real-world images.