 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Model for Material Experiments Based on Prior Knowledge and Attention Mechanism
Nov 16, 2018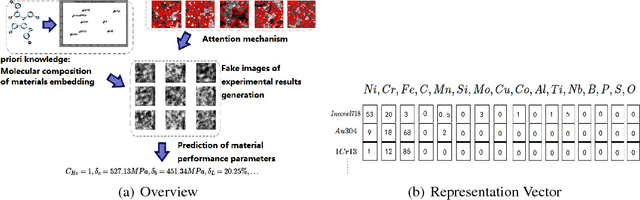



Material irradiation experiment is dangerous and complex, thus it requires those with a vast advanced expertise to process the images and data manually. In this paper, we propose a generative adversarial model based on prior knowledge and attention mechanism to achieve the generation of irradiated material images (data-to-image model), and a prediction model for corresponding industrial performance (image-to-data model). With the proposed models, researchers can skip the dangerous and complex irradiation experiments and obtain the irradiation images and industrial performance parameters directly by inputing some experimental parameters only. We also introduce a new dataset ISMD which contains 22000 irradiated images with 22,143 sets of corresponding parameters. Our model achieved high quality results by compared with several baseline models. The evaluation and detailed analysis are also performed.
Orthogonal Policy Gradient and Autonomous Driving Application
Nov 15, 2018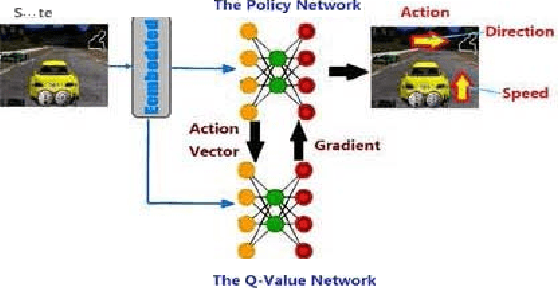
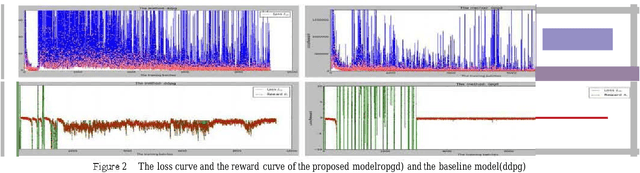
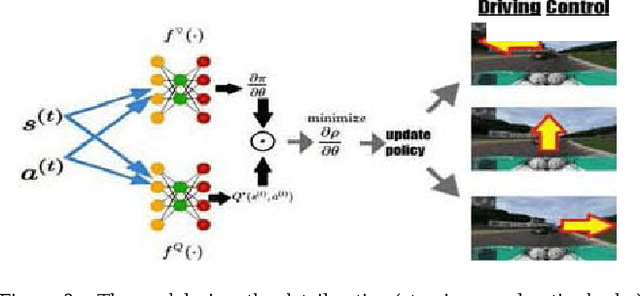

One less addressed issue of deep reinforcement learning is the lack of generalization capability based on new state and new target, for complex tasks, it is necessary to give the correct strategy and evaluate all possible actions for current state. Fortunately, deep reinforcement learning has enabled enormous progress in both subproblems: giving the correct strategy and evaluating all actions based on the state. In this paper we present an approach called orthogonal policy gradient descent(OPGD) that can make agent learn the policy gradient based on the current state and the actions set, by which the agent can learn a policy network with generalization capability. we evaluate the proposed method on the 3D autonomous driving enviroment TORCS compared with the baseline model, detailed analyses of experimental results and proofs are also given.