 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecent Advances in Path Integral Control for Trajectory Optimization: An Overview in Theoretical and Algorithmic Perspectives
Sep 22, 2023This paper presents a tutorial overview of path integral (PI) control approaches for stochastic optimal control and trajectory optimization. We concisely summarize the theoretical development of path integral control to compute a solution for stochastic optimal control and provide algorithmic descriptions of the cross-entropy (CE) method, an open-loop controller using the receding horizon scheme known as the model predictive path integral (MPPI), and a parameterized state feedback controller based on the path integral control theory. We discuss policy search methods based on path integral control, efficient and stable sampling strategies, extensions to multi-agent decision-making, and MPPI for the trajectory optimization on manifolds. For tutorial demonstrations, some PI-based controllers are implemented in MATLAB and ROS2/Gazebo simulations for trajectory optimization. The simulation frameworks and source codes are publicly available at https://github.com/INHA-Autonomous-Systems-Laboratory-ASL/An-Overview-on-Recent-Advances-in-Path-Integral-Control.
MPPI-IPDDP: Hybrid Method of Collision-Free Smooth Trajectory Generation for Autonomous Robots
Aug 04, 2022

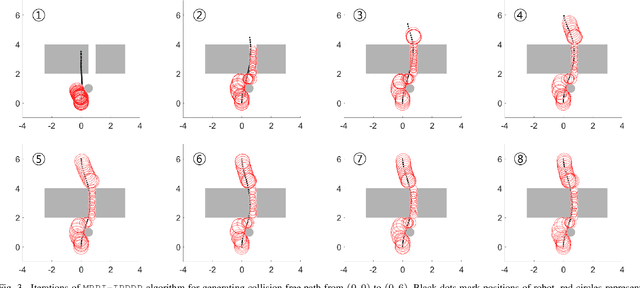

This study presents a hybrid trajectory optimization method that generates a collision-free smooth trajectory for autonomous mobile robots. The hybrid method combines sampling-based model predictive path integral (MPPI) control and gradient-based interior-point differential dynamic programming (IPDDP) exploiting their advantages of exploration and smoothing. The proposed method, called MPPI-IPDDP, consists of three steps. The first step generates a coarse trajectory by MPPI control, the second step constructs a collision-free convex corridor, and the third step smooths the coarse trajectory by IPDDP using the collision-free convex corridor computed in the second step. For demonstration, the proposed algorithm was applied to trajectory optimization for differential-driving wheeled mobile robots and point-mass quadrotors. A supplementary video of the simulations can be found at https://youtu.be/-oUAt5sd9Bk.