 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Relative Pose Estimation in SE with Observability Analysis: A Comparison of Extended Kalman Filtering and Robust Pose Graph Optimization
Feb 04, 2024



In this study, we address multi-robot localization issues, with a specific focus on cooperative localization and observability analysis of relative pose estimation. Cooperative localization involves enhancing each robot's information through a communication network and message passing. If odometry data from a target robot can be transmitted to the ego robot, observability of their relative pose estimation can be achieved through range-only or bearing-only measurements, provided both robots have non-zero linear velocities. In cases where odometry data from a target robot are not directly transmitted but estimated by the ego robot, both range and bearing measurements are necessary to ensure observability of relative pose estimation. For ROS/Gazebo simulations, we explore four sensing and communication structures. We compare extended Kalman filtering (EKF) and pose graph optimization (PGO) estimation using different robust loss functions (filtering and smoothing with varying batch sizes of sliding windows) in terms of estimation accuracy. In hardware experiments, two Turtlebot3 equipped with UWB modules are used for real-world inter-robot relative pose estimation, applying both EKF and PGO and comparing their performance.
Aggressive Trajectory Tracking for Nano Quadrotors Using Embedded Nonlinear Model Predictive Control
Dec 02, 2023This paper presents an aggressive trajectory tracking method for a small lightweight nano-quadrotor using nonlinear model predictive control (NMPC) based on acados. Controlling a nano quadrotor for accurate trajectory tracking at high speed in dynamic environments is challenging due to complex aerodynamic forces that introduce significant disturbances and large positional tracking errors. These aerodynamic effects are difficult to be identified and require feedback control that compensates for them in real time. NMPC allows the nano-quadrotor to control its motion in real time based on onboard sensor measurements, making it well-suited for tasks such as aggressive maneuvers and navigation in complex and dynamic environments. The software package acados enables the implementation of the NMPC algorithm on embedded systems, which is particularly important for nano-quadrotor due to its limited computational resources. Our autonomous navigation system is developed based on an AI-deck that is a GAP8-based parallel ultra-low power computing platform with onboard sensors of a multi-ranger deck and a flow deck. The proposed method of NMPC-based trajectory tracking control is tested in simulation and the results demonstrate its effectiveness in trajectory tracking while considering the dynamic environments. It is also tested on a real nano quadrotor hardware, 27-g Crazyflie 2.1, with a customized MCU running embedded NMPC, in which accurate trajectory tracking results are achieved in dynamic real-world environments.
Recent Advances in Path Integral Control for Trajectory Optimization: An Overview in Theoretical and Algorithmic Perspectives
Sep 22, 2023This paper presents a tutorial overview of path integral (PI) control approaches for stochastic optimal control and trajectory optimization. We concisely summarize the theoretical development of path integral control to compute a solution for stochastic optimal control and provide algorithmic descriptions of the cross-entropy (CE) method, an open-loop controller using the receding horizon scheme known as the model predictive path integral (MPPI), and a parameterized state feedback controller based on the path integral control theory. We discuss policy search methods based on path integral control, efficient and stable sampling strategies, extensions to multi-agent decision-making, and MPPI for the trajectory optimization on manifolds. For tutorial demonstrations, some PI-based controllers are implemented in MATLAB and ROS2/Gazebo simulations for trajectory optimization. The simulation frameworks and source codes are publicly available at https://github.com/INHA-Autonomous-Systems-Laboratory-ASL/An-Overview-on-Recent-Advances-in-Path-Integral-Control.
Adaptive Goal Management System of Robots
Mar 21, 2023



This paper considers the problem of managing single or multiple robots and proposes a cloud-based robot fleet manager, Adaptive Goal Management (AGM) System, for teams of unmanned mobile robots. The AGM system uses an adaptive goal execution approach and provides a restful API for communication between single or multiple robots, enabling real-time monitoring and control. The overarching goal of AGM is to coordinate single or multiple robots to productively complete tasks in an environment. There are some existing works that provide various solutions for managing single or multiple robots, but the proposed AGM system is designed to be adaptable and scalable, making it suitable for managing multiple heterogeneous robots in diverse environments with dynamic changes. The proposed AGM system presents a versatile and efficient solution for managing single or multiple robots across multiple industries, such as healthcare, agriculture, airports, manufacturing, and logistics. By enhancing the capabilities of these robots and enabling seamless task execution, the AGM system offers a powerful tool for facilitating complex operations. The effectiveness of the proposed AGM system is demonstrated through simulation experiments in diverse environments using ROS1 with Gazebo. The results show that the AGM system efficiently manages the allocated tasks and missions. Tests conducted in the manufacturing industry have shown promising results in task and mission management for both a single Mobile Industrial Robot and multiple Turtlebot3 robots. To provide further insights, a supplementary video showcasing the experiments can be found at https://github.com/mukmalone/ AdaptiveGoalManagement.
MPPI-IPDDP: Hybrid Method of Collision-Free Smooth Trajectory Generation for Autonomous Robots
Aug 04, 2022

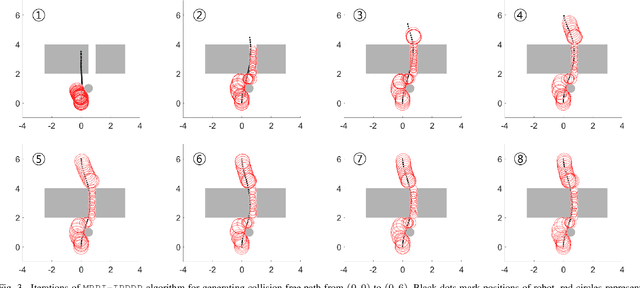

This study presents a hybrid trajectory optimization method that generates a collision-free smooth trajectory for autonomous mobile robots. The hybrid method combines sampling-based model predictive path integral (MPPI) control and gradient-based interior-point differential dynamic programming (IPDDP) exploiting their advantages of exploration and smoothing. The proposed method, called MPPI-IPDDP, consists of three steps. The first step generates a coarse trajectory by MPPI control, the second step constructs a collision-free convex corridor, and the third step smooths the coarse trajectory by IPDDP using the collision-free convex corridor computed in the second step. For demonstration, the proposed algorithm was applied to trajectory optimization for differential-driving wheeled mobile robots and point-mass quadrotors. A supplementary video of the simulations can be found at https://youtu.be/-oUAt5sd9Bk.