 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Novel view synthesis of 360$^\circ$ Scenes in Extremely Sparse Views by Jointly Training Hemisphere Sampled Synthetic Images
May 25, 2025Novel view synthesis in 360$^\circ$ scenes from extremely sparse input views is essential for applications like virtual reality and augmented reality. This paper presents a novel framework for novel view synthesis in extremely sparse-view cases. As typical structure-from-motion methods are unable to estimate camera poses in extremely sparse-view cases, we apply DUSt3R to estimate camera poses and generate a dense point cloud. Using the poses of estimated cameras, we densely sample additional views from the upper hemisphere space of the scenes, from which we render synthetic images together with the point cloud. Training 3D Gaussian Splatting model on a combination of reference images from sparse views and densely sampled synthetic images allows a larger scene coverage in 3D space, addressing the overfitting challenge due to the limited input in sparse-view cases. Retraining a diffusion-based image enhancement model on our created dataset, we further improve the quality of the point-cloud-rendered images by removing artifacts. We compare our framework with benchmark methods in cases of only four input views, demonstrating significant improvement in novel view synthesis under extremely sparse-view conditions for 360$^\circ$ scenes.
Development of Ultra-Portable 3D Mapping Systems for Emergency Services
May 06, 2024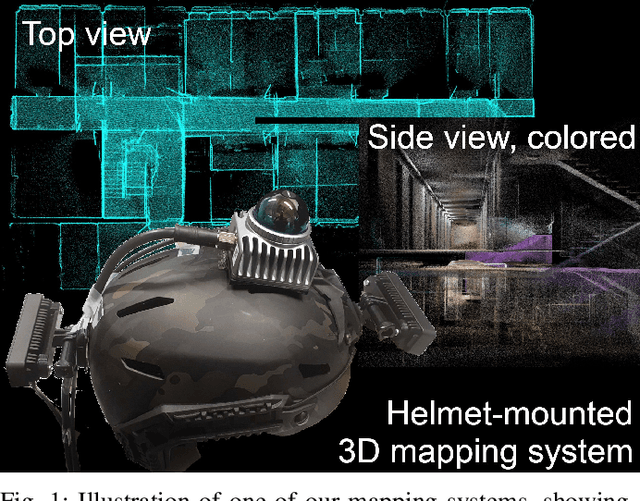
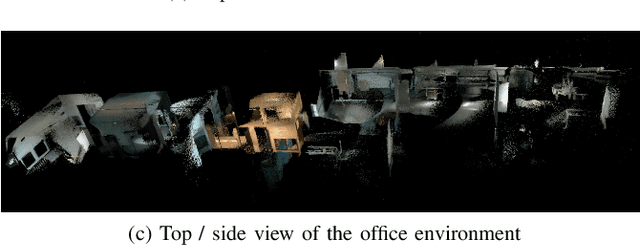
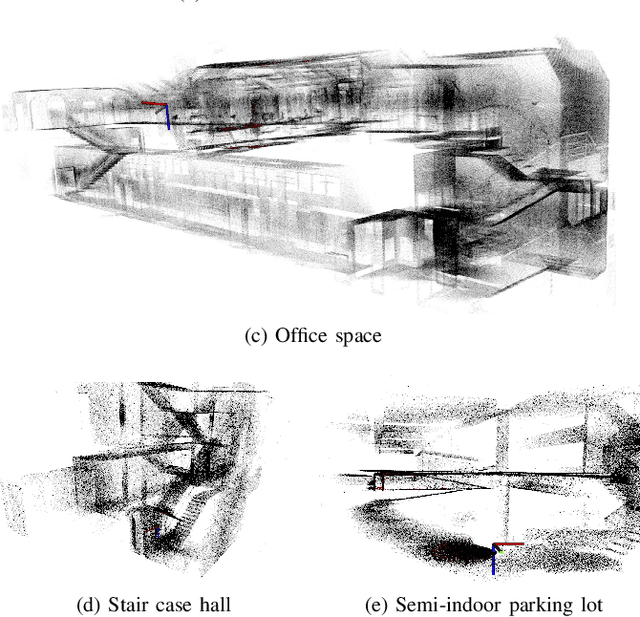
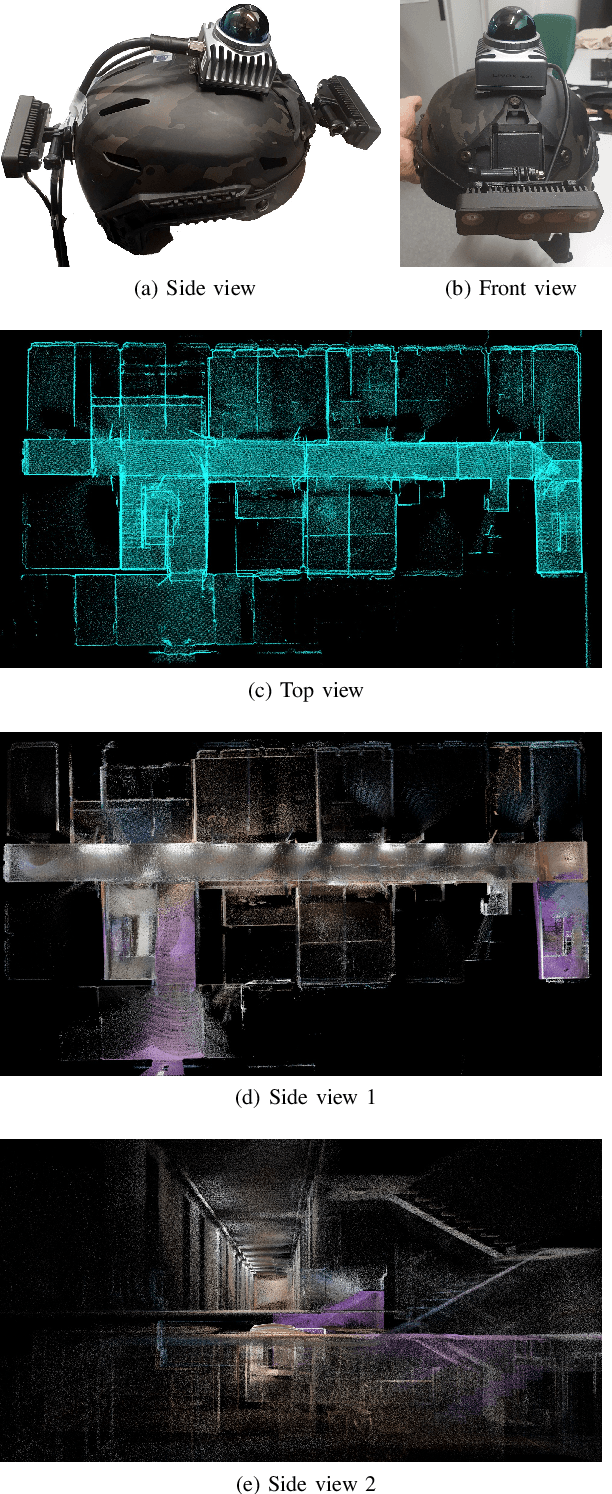
Miniaturization of cameras and LiDAR sensors has enabled the development of wearable 3D mapping systems for emergency responders. These systems have the potential to revolutionize response capabilities by providing real-time, high-fidelity maps of dynamic and hazardous environments. We present our recent efforts towards the development of such ultra-portable 3D mapping systems. We review four different sensor configurations, either helmet-mounted or body-worn, with two different mapping algorithms that were implemented and evaluated during field trials. The paper discusses the experimental results with the aim to stimulate further discussion within the portable 3D mapping research community.