 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle Teleoperation: Performance Assessment of SRPT Approach Under State Estimation Errors
May 19, 2023Vehicle teleoperation has numerous potential applications, including serving as a backup solution for autonomous vehicles, facilitating remote delivery services, and enabling hazardous remote operations. However, complex urban scenarios, limited situational awareness, and network delay increase the cognitive workload of human operators and degrade teleoperation performance. To address this, the successive reference pose tracking (SRPT) approach was introduced in earlier work, which transmits successive reference poses to the remote vehicle instead of steering commands. The operator generates reference poses online with the help of a joystick steering and an augmented display, potentially mitigating the detrimental effects of delays. However, it is not clear which minimal set of sensors is essential for the SRPT vehicle teleoperation control loop. This paper tests the robustness of the SRPT approach in the presence of state estimation inaccuracies, environmental disturbances, and measurement noises. The simulation environment, implemented in Simulink, features a 14-dof vehicle model and incorporates difficult maneuvers such as tight corners, double-lane changes, and slalom. Environmental disturbances include low adhesion track regions and strong cross-wind gusts. The results demonstrate that the SRPT approach, using either estimated or actual states, performs similarly under various worst-case scenarios, even without a position sensor requirement. Additionally, the designed state estimator ensures sufficient performance with just an inertial measurement unit, wheel speed encoder, and steer encoder, constituting a minimal set of essential sensors for the SRPT vehicle teleoperation control loop.
SRPT vs Smith Predictor for Vehicle Teleoperation
Apr 27, 2023Vehicle teleoperation has potential applications in fallback solutions for autonomous vehicles, remote delivery services, and hazardous operations. However, network delays and limited situational awareness can compromise teleoperation performance and increase the cognitive workload of human operators. To address these issues, we previously introduced the novel successive reference pose tracking (SRPT) approach, which transmits successive reference poses to the vehicle instead of steering commands. This paper compares the stability and performance of SRPT with Smith predictor-based approaches for direct vehicle teleoperation in challenging scenarios. The Smith predictor approach is further categorized, one with Lookahead driver and second with Stanley driver. Simulations are conducted in a Simulink environment, considering variable network delays and different vehicle speeds, and include maneuvers such as tight corners, slalom, low-adhesion roads, and strong crosswinds. The results show that the SRPT approach significantly improves stability and reference tracking performance, with negligible effect of network delays on path tracking. Our findings demonstrate the effectiveness of SRPT in eliminating the detrimental effect of network delays in vehicle teleoperation.
Predictive Display with Perspective Projection of Surroundings in Vehicle Teleoperation to Account Time-delays
Nov 22, 2022



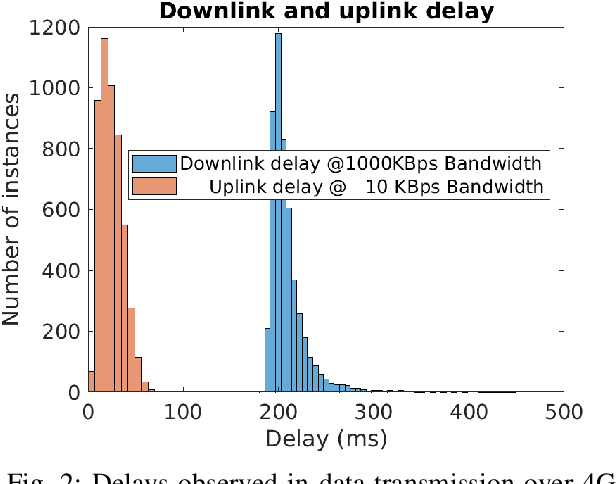
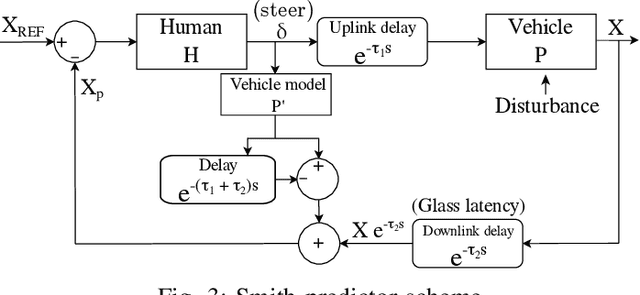
Teleoperation provides human operator sophisticated perceptual and cognitive skills into an over the network control loop. It gives hope of addressing some challenges related to vehicular autonomy which is based on artificial intelligence by providing a backup plan. Variable network time delays in data transmission is the major problem in teleoperating a vehicle. On 4G network, variability of these delays is high. Due to this, both video streaming and driving commands encounter variable time delay. This paper presents an approach of providing the human operator a forecast video stream which replicates future perspective of vehicle field of view accounting the delay present in the network. Regarding the image transformation, perspective projection technique is combined with correction given by smith predictor in the control loop. This image transformation accounts current time delay and tries to address both issues, time delays as well as its variability. For experiment sake, only frontward field of view is forecast. Performance is evaluated by performing online vehicle teleoperation on street edge case maneuvers and later comparing the path deviation with and without perspective projection.
Vehicle Teleoperation: Successive Reference-Pose Tracking
Jun 08, 2022
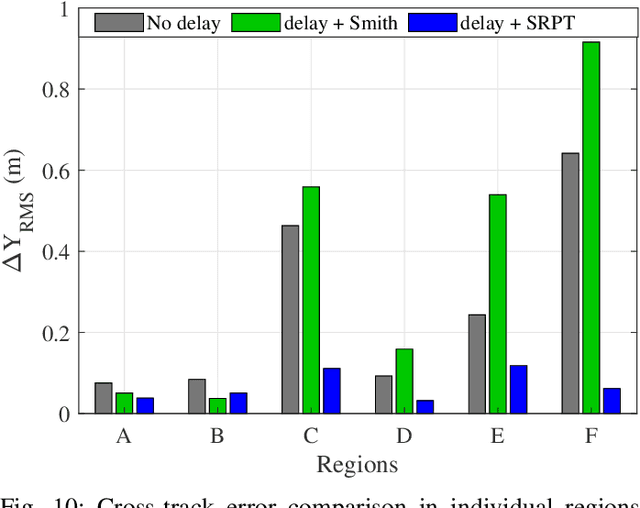
Vehicle teleoperation is an interesting feature in many fields. A typical problem of teleoperation is communication time delay which, together with actuator saturation and environmental disturbance, can cause a vehicle deviation from the target trajectory imposed by the human operator who imposes to the vehicle a steering wheel angle reference and a speed/acceleration reference. With predictive techniques, time-delay can be accounted at sufficient extent. But, in presence of disturbances, due to the absence of instantaneous haptic and visual feedback, human-operator steering command transmitted to the the vehicle is unaccounted with disturbances observed by the vehicle. To improve reference tracking without losing promptness in driving control, reference trajectory in the form of successive reference poses can be transmitted instead of steering commands to the vehicle. We introduce this new concept, namely, the 'successive reference-pose tracking (SRPT)' to improve path tracking in vehicle teleoperation. This paper discusses feasibility and advantages of this new method, compare to the smith predictor control approach. Simulations are performed in SIMULINK environment, where a 14-dof vehicle model is being controlled with Smith and SRPT controllers in presence of variable network delay. Scenarios for performance comparison are low adhesion ground, strong lateral wind and steer-rate demanding maneuvers. Simulation result shows significant improvement in reference tracking with SRPT approach.