 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantitative Depth Quality Assessment of RGBD Cameras At Close Range Using 3D Printed Fixtures
Mar 21, 2019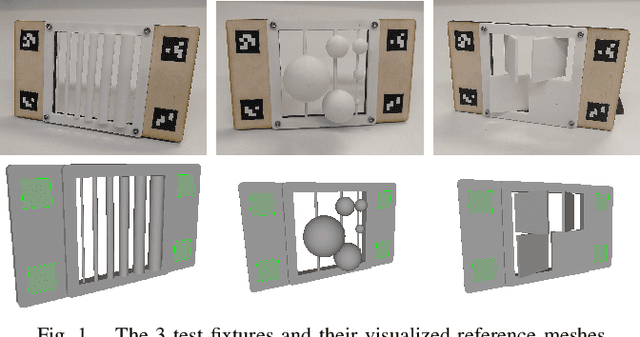
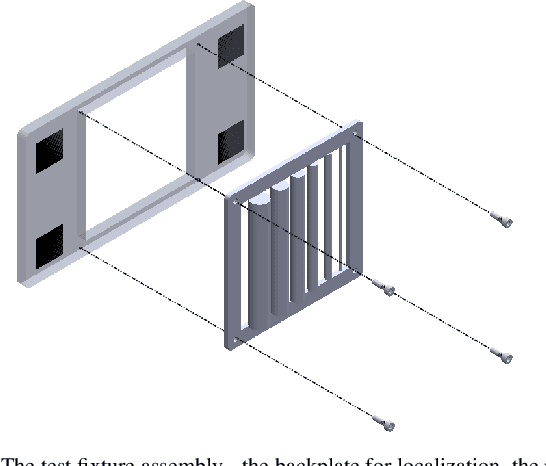
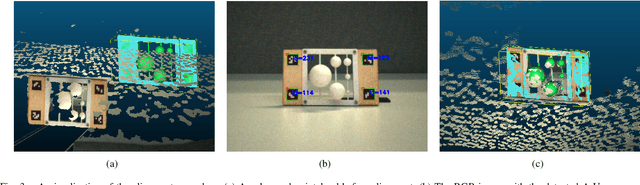

Mobile robots that manipulate their environments require high-accuracy scene understanding at close range. Typically this understanding is achieved with RGBD cameras, but the evaluation process for selecting an appropriate RGBD camera for the application is minimally quantitative. Limited manufacturer-published metrics do not translate to observed quality in real-world cluttered environments, since quality is application-specific. To bridge the gap, we present a method for quantitatively measuring depth quality using a set of extendable 3D printed fixtures that approximate real-world conditions. By framing depth quality as point cloud density and root mean square error (RMSE) from a known geometry, we present a method that is extendable by other system integrators for custom environments. We show a comparison of 3 cameras and present a case study for camera selection, provide reference meshes and analysis code, and discuss further extensions.
Deep Learning Approximation: Zero-Shot Neural Network Speedup
Jun 15, 2018



Neural networks offer high-accuracy solutions to a range of problems, but are costly to run in production systems because of computational and memory requirements during a forward pass. Given a trained network, we propose a techique called Deep Learning Approximation to build a faster network in a tiny fraction of the time required for training by only manipulating the network structure and coefficients without requiring re-training or access to the training data. Speedup is achieved by by applying a sequential series of independent optimizations that reduce the floating-point operations (FLOPs) required to perform a forward pass. First, lossless optimizations are applied, followed by lossy approximations using singular value decomposition (SVD) and low-rank matrix decomposition. The optimal approximation is chosen by weighing the relative accuracy loss and FLOP reduction according to a single parameter specified by the user. On PASCAL VOC 2007 with the YOLO network, we show an end-to-end 2x speedup in a network forward pass with a 5% drop in mAP that can be re-gained by finetuning.