 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Correlations in Federated Learning: Opportunities and Practical Limitations
Apr 16, 2026The communication bottleneck in federated learning (FL) has spurred extensive research into techniques to reduce the volume of data exchanged between client devices and the central parameter server. In this paper, we systematically classify gradient and model compression schemes into three categories based on the type of correlations they exploit: structural, temporal, and spatial. We examine the sources of such correlations, propose quantitative metrics for measuring their magnitude, and reinterpret existing compression methods through this unified correlation-based framework. Our experimental studies demonstrate that the degrees of structural, temporal, and spatial correlations vary significantly depending on task complexity, model architecture, and algorithmic configurations. These findings suggest that algorithm designers should carefully evaluate correlation assumptions under specific deployment scenarios rather than assuming that they are always present. Motivated by these findings, we propose two adaptive compression designs that actively switch between different compression modes based on the measured correlation strength, and we evaluate their performance gains relative to conventional non-adaptive approaches. In summary, our unified taxonomy provides a clean and principled foundation for developing more effective and application-specific compression techniques for FL systems.
Reduced-Complexity Model Selection and Rate Allocation for Multiple-Model Electrical Signal Compression
Nov 13, 2025This paper adapts a Multiple-Model Coding (MMC) approach for sampled electrical signal waveforms to satisfy reconstructed signal quality constraints. The baseline MMC approach consists of two stages processing vectors of Voltage and Current Signal (VCS) of constant size and producing bitstreams of constant rate but varying quality. In the proposed approach, the parametric model and the rate allocated to the first stage, as well as the residual compression method of the second stage and its associated rate, are jointly optimized to achieve a target distortion of the reconstructed signal. Three approaches are proposed. An exhaustive search serves as a baseline for comparison. Then, an approach involving a Golden Section search is exploited to determine the rate of the first stage with reduced complexity. Finally, rate-distortion models of the compression efficiency for each model in the first stage are employed to obtain a subset of promising models in the first stage and reduced-size search intervals for the rate selection in both stages. Simulation results demonstrate that the proposed reduced-complexity MMC approach reduces the rate for a given distortion constraint compared to state-of-the-art solutions for VCS with equivalent complexity.
Temporal Predictive Coding for Gradient Compression in Distributed Learning
Oct 03, 2024This paper proposes a prediction-based gradient compression method for distributed learning with event-triggered communication. Our goal is to reduce the amount of information transmitted from the distributed agents to the parameter server by exploiting temporal correlation in the local gradients. We use a linear predictor that \textit{combines past gradients to form a prediction of the current gradient}, with coefficients that are optimized by solving a least-square problem. In each iteration, every agent transmits the predictor coefficients to the server such that the predicted local gradient can be computed. The difference between the true local gradient and the predicted one, termed the \textit{prediction residual, is only transmitted when its norm is above some threshold.} When this additional communication step is omitted, the server uses the prediction as the estimated gradient. This proposed design shows notable performance gains compared to existing methods in the literature, achieving convergence with reduced communication costs.
Set-membership target search and tracking within an unknown cluttered area using cooperating UAVs equipped with vision systems
Mar 22, 2024This paper addresses the problem of target search and tracking using a fleet of cooperating UAVs evolving in some unknown region of interest containing an a priori unknown number of moving ground targets. Each drone is equipped with an embedded Computer Vision System (CVS), providing an image with labeled pixels and a depth map of the observed part of its environment. Moreover, a box containing the corresponding pixels in the image frame is available when a UAV identifies a target. Hypotheses regarding information provided by the pixel classification, depth map construction, and target identification algorithms are proposed to allow its exploitation by set-membership approaches. A set-membership target location estimator is developed using the information provided by the CVS. Each UAV evaluates sets guaranteed to contain the location of the identified targets and a set possibly containing the locations of targets still to be identified. Then, each UAV uses these sets to search and track targets cooperatively.
Low-complexity graph-based traveling wave models for HVDC grids with hybrid transmission lines: Application to fault identification
Mar 12, 2021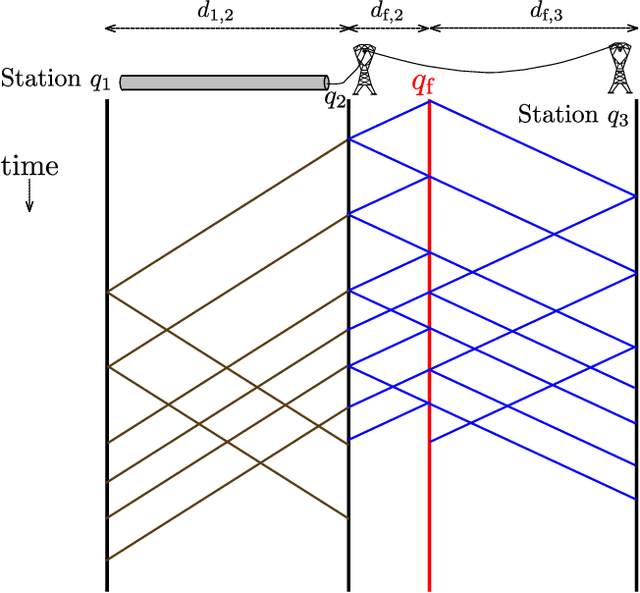
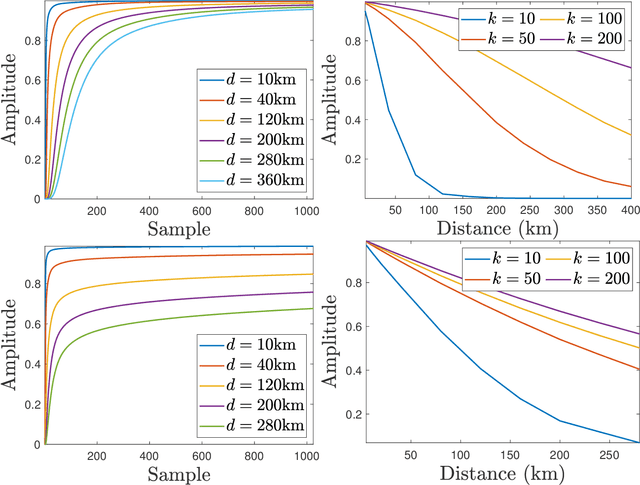
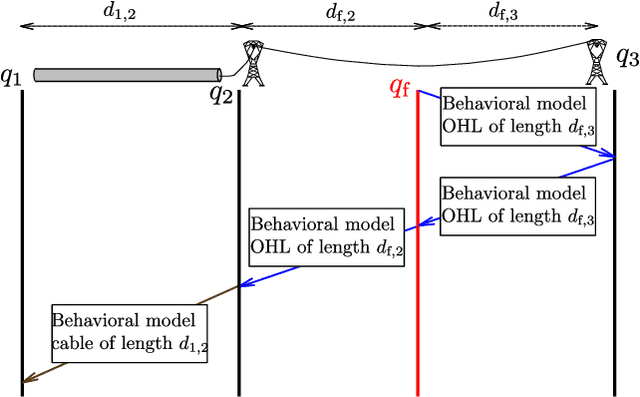
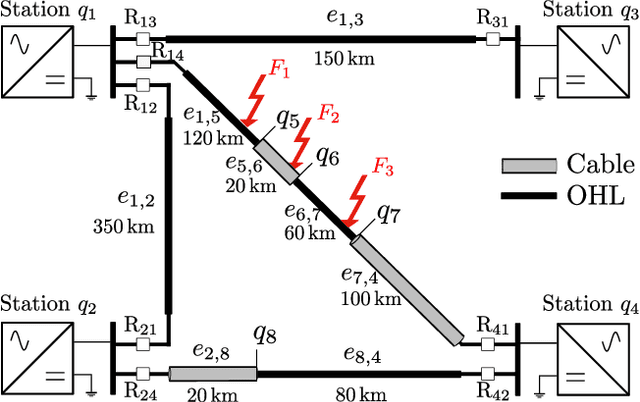
The fast protection of meshed HVDC grids requires the modeling of the transient phenomena affecting the grid after a fault. In the case of hybrid lines comprising both overhead and underground parts, the numerous generated traveling waves may be difficult to describe and evaluate. This paper proposes a representation of the grid as a graph, allowing to take into account any waves traveling through the grid. A relatively compact description of the waves is then derived, based on a combined physical and behavioral modeling approach. The obtained model depends explicitly on the characteristics of the grid as well as on the fault parameters. An application of the model to the identification of the faulty portion of an hybrid line is proposed. The knowledge of the faulty portion is profitable as faults in overhead lines, generally temporary, can lead to the reclosing of the line.