 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Antenna Selection and Covariance Matrix Optimization for ISAC Systems
Oct 17, 2024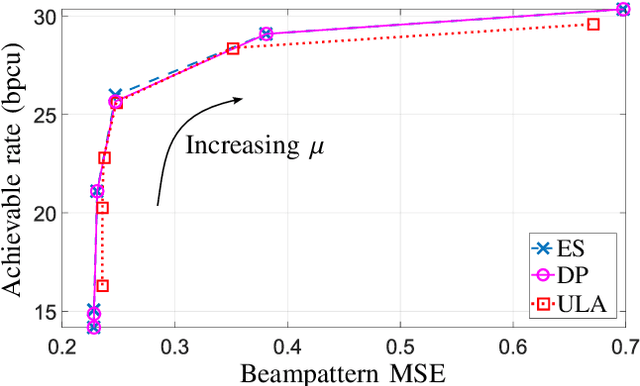
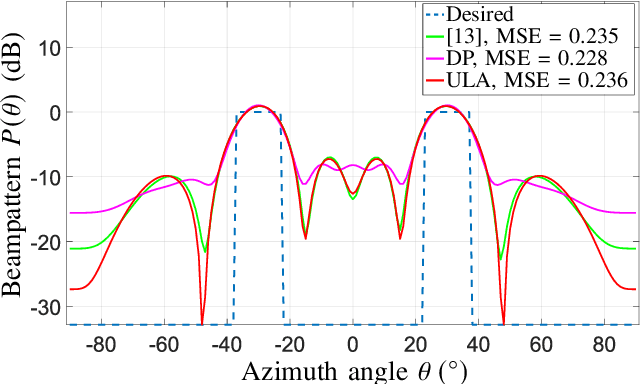
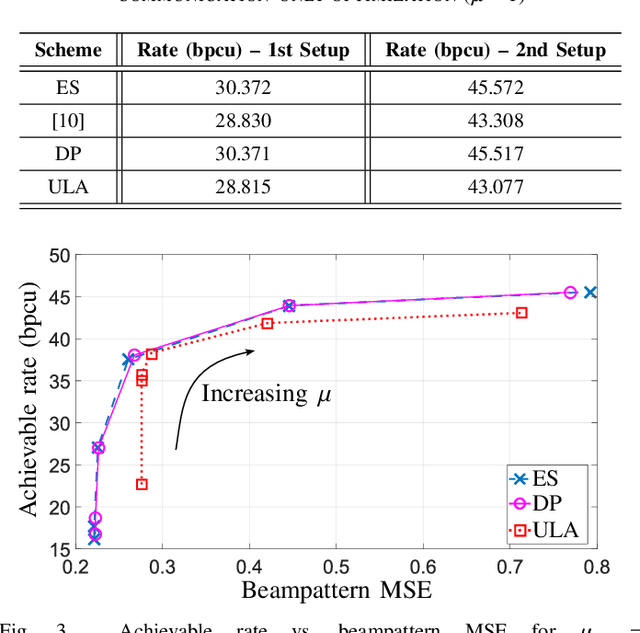
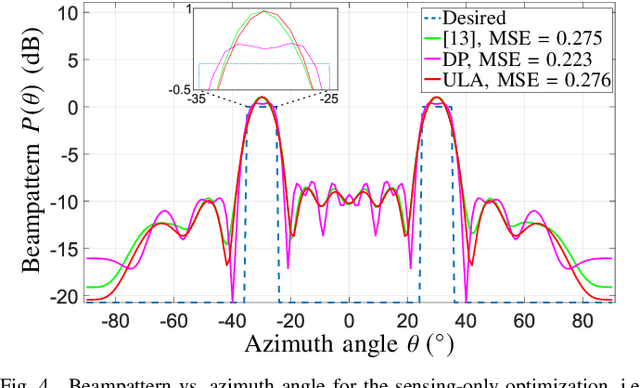
We consider an integrated sensing and communication (ISAC) system with a single communication user and multiple targets. For the communication functionality, the achievable rate is employed as the performance metric, while for sensing, we focus on minimizing the mean squared error (MSE) between the designed beampattern and a desired one for tracking the targets. Towards this, and by assuming that there are fewer radiofrequency (RF) chains than antenna elements at the transmitter (Tx), we focus on the joint antenna selection (AS) and covariance matrix (CM) optimization at the Tx. This is a mixed-integer optimization problem, yet we demonstrate that it can be efficiently solved, in polynomial time, by combining convex optimization tools with dynamic programming (DP). By introducing an adjustable trade-off parameter, we formulate a joint objective function that captures both the communication and sensing metric. In this way, different ISAC solutions can be obtained, considering the trade-off among the two functionalities. It is shown that selecting the active antennas with our proposed method is superior than assuming a uniform Tx array with fixed antenna positions. Notably, by individually considering the optimization of either the sensing or the communication system alone, our proposed algorithm outperforms the literature proposals, by incurring only a small increase in complexity.
Non-uniform array design for robust LoS MIMO via convex optimization
Feb 14, 2023The array design problem of multiple-input multiple-output (MIMO) systems in a line-of-sight (LoS) transmit environment is examined. As uniform array configurations at the transmitter (Tx) and receiver (Rx) are optimal at specific transmit distances only, they lead to reduced spectral efficiency over a range of transmit distances. To that end, the joint design of nonuniform Tx and Rx arrays towards maximizing the minimum capacity of a LoS MIMO system across a range of transmit distances is investigated in this paper. By introducing convex relaxation, the joint Tx and Rx array design is cast as a convex optimization problem, which is solved in a iterative manner. In addition, we also implement a local search to obtain a refined solution that achieves an improved performance. It is shown that the non-uniform configurations designed with our proposed approach outperform uniform and non-uniform array designs of the literature in terms of capacity and/or complexity.
Low Latency Scheduling Algorithms for Full-Duplex V2X Networks
Jan 13, 2021


Vehicular communication systems have been an active subject of research for many years and are important technologies in the 5G and the post-5G era. One important use case is platooning which is seemingly the first step towards fully autonomous driving systems. Furthermore, a key performance parameter in all vehicular communication systems is the end-to-end packet latency. Towards this goal, full-duplex (FD) transceivers can potentially be an efficient and practical solution towards reducing the delay in platooning networks. In this paper, we study the delay performance of dynamic and TDMAbased scheduling algorithms and assess the effect of FD-enabled vehicles with imperfect self-interference cancellation (SIC). By simulations, we demonstrate the performance-complexity tradeoff of these algorithms and show that a TDMA centralized scheme with low-complexity and overhead can achieve comparable performance with a fully-dynamic, centralized algorithm.