 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision-Theoretic Control of Problem Solving: Principles and Architecture
Mar 27, 2013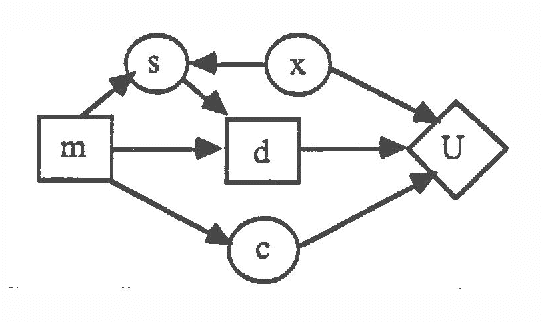
This paper presents an approach to the design of autonomous, real-time systems operating in uncertain environments. We address issues of problem solving and reflective control of reasoning under uncertainty in terms of two fundamental elements: l) a set of decision-theoretic models for selecting among alternative problem-solving methods and 2) a general computational architecture for resource-bounded problem solving. The decisiontheoretic models provide a set of principles for choosing among alternative problem-solving methods based on their relative costs and benefits, where benefits are characterized in terms of the value of information provided by the output of a reasoning activity. The output may be an estimate of some uncertain quantity or a recommendation for action. The computational architecture, called Schemer-ll, provides for interleaving of and communication among various problem-solving subsystems. These subsystems provide alternative approaches to information gathering, belief refinement, solution construction, and solution execution. In particular, the architecture provides a mechanism for interrupting the subsystems in response to critical events. We provide a decision theoretic account for scheduling problem-solving elements and for critical-event-driven interruption of activities in an architecture such as Schemer-II.
Computationally-Optimal Real-Resource Strategies
Mar 27, 2013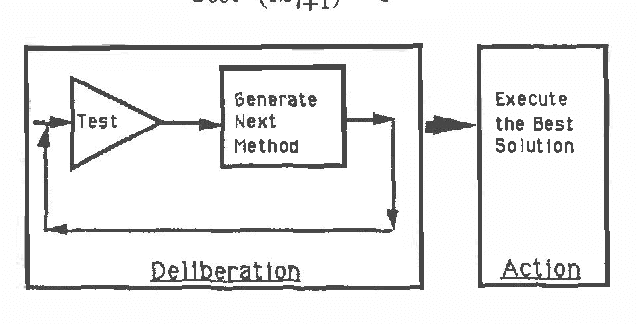
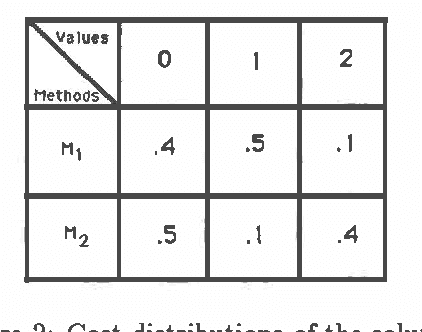
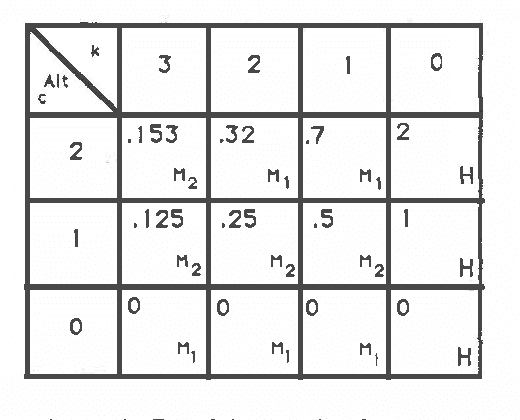
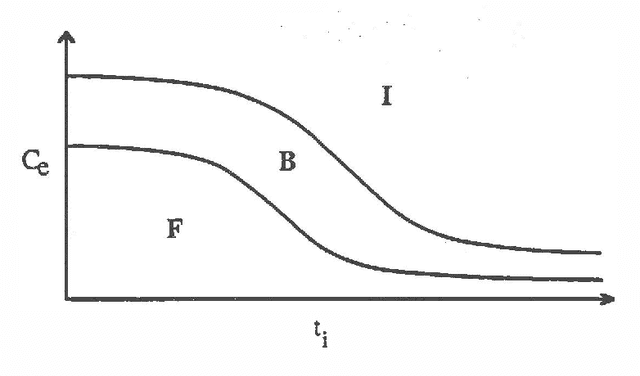
This paper focuses on managing the cost of deliberation before action. In many problems, the overall quality of the solution reflects costs incurred and resources consumed in deliberation as well as the cost and benefit of execution, when both the resource consumption in deliberation phase, and the costs in deliberation and execution are uncertain and may be described by probability distribution functions. A feasible (in terms of resource consumption) strategy that minimizes the expected total cost is termed computationally-optimal. For a situation with several independent, uninterruptible methods to solve the problem, we develop a pseudopolynomial-time algorithm to construct generate-and-test computationally optimal strategy. We show this strategy-construction problem to be NP-complete, and apply Bellman's Optimality Principle to solve it efficiently.
Decision Methods for Adaptive Task-Sharing in Associate Systems
Mar 13, 2013



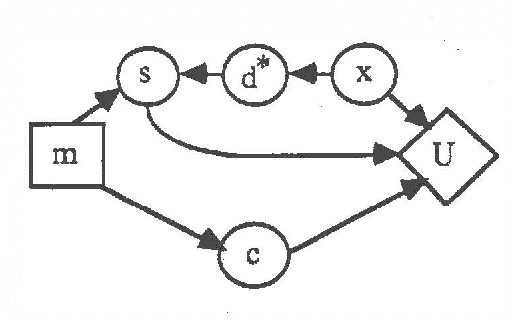
This paper describes some results of research on associate systems: knowledge-based systems that flexibly and adaptively support their human users in carrying out complex, time-dependent problem-solving tasks under uncertainty. Based on principles derived from decision theory and decision analysis, a problem-solving approach is presented which can overcome many of the limitations of traditional expert-systems. This approach implements an explicit model of the human user's problem-solving capabilities as an integral element in the overall problem solving architecture. This integrated model, represented as an influence diagram, is the basis for achieving adaptive task sharing behavior between the associate system and the human user. This associate system model has been applied toward ongoing research on a Mars Rover Manager's Associate (MRMA). MRMA's role would be to manage a small fleet of robotic rovers on the Martian surface. The paper describes results for a specific scenario where MRMA examines the benefits and costs of consulting human experts on Earth to assist a Mars rover with a complex resource management decision.
Probabilistic Conceptual Network: A Belief Representation Scheme for Utility-Based Categorization
Mar 06, 2013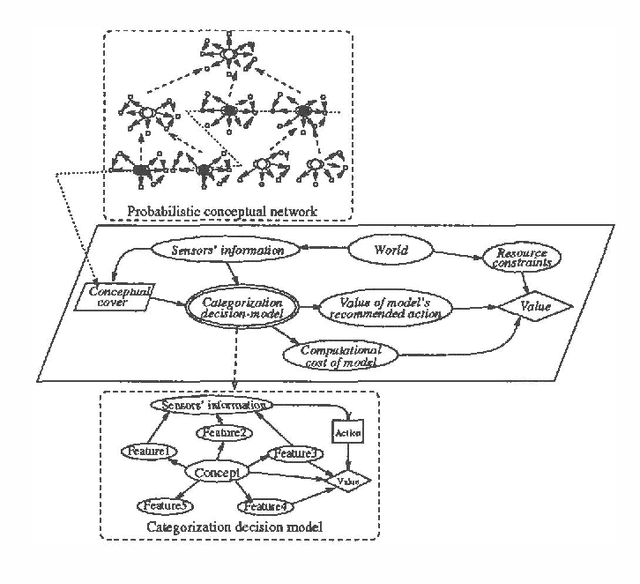

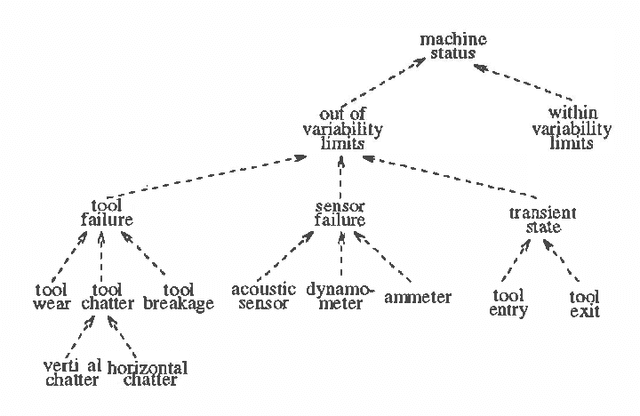
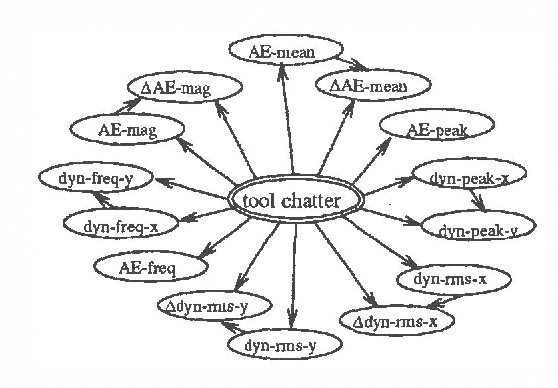
Probabilistic conceptual network is a knowledge representation scheme designed for reasoning about concepts and categorical abstractions in utility-based categorization. The scheme combines the formalisms of abstraction and inheritance hierarchies from artificial intelligence, and probabilistic networks from decision analysis. It provides a common framework for representing conceptual knowledge, hierarchical knowledge, and uncertainty. It facilitates dynamic construction of categorization decision models at varying levels of abstraction. The scheme is applied to an automated machining problem for reasoning about the state of the machine at varying levels of abstraction in support of actions for maintaining competitiveness of the plant.
A Structured, Probabilistic Representation of Action
Feb 27, 2013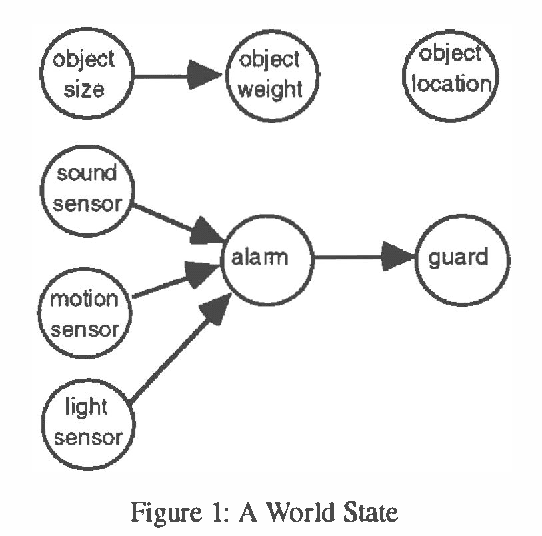
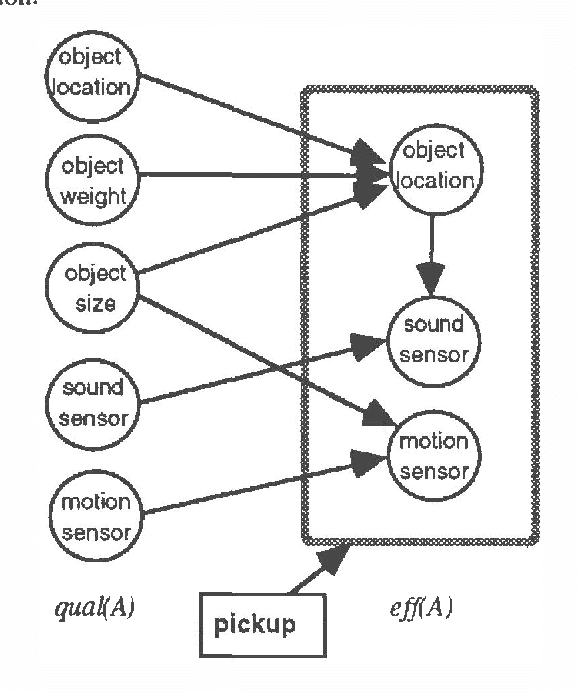
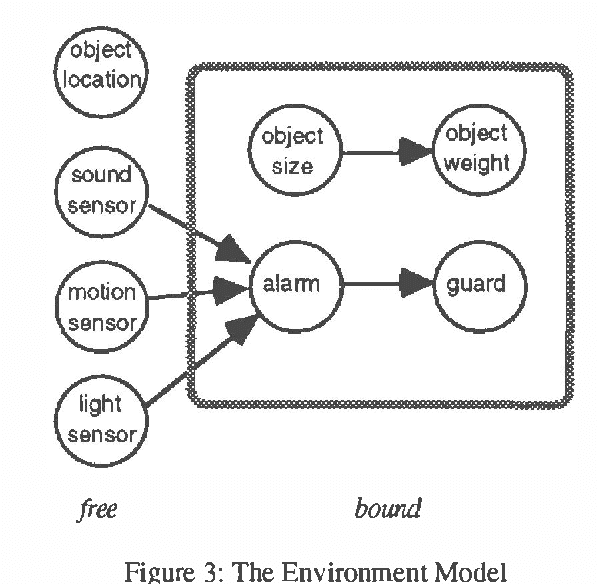
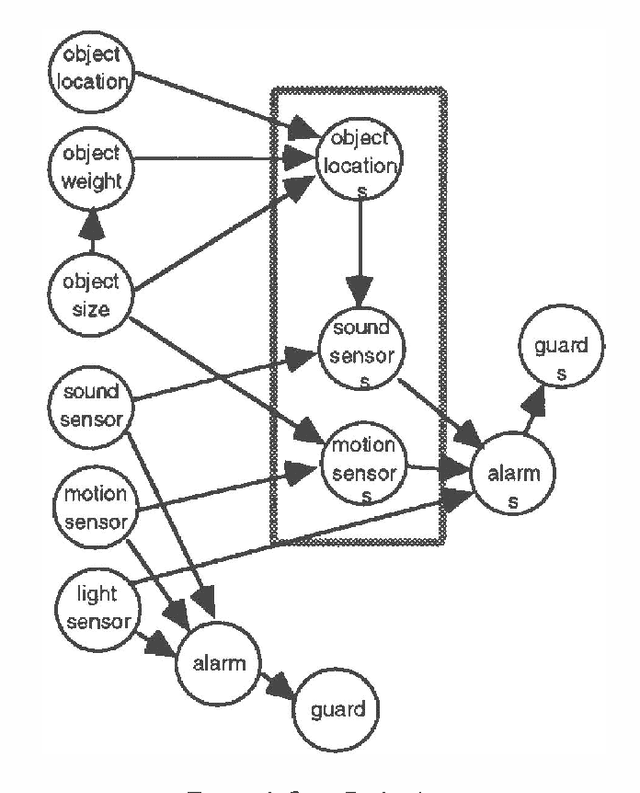
When agents devise plans for execution in the real world, they face two important forms of uncertainty: they can never have complete knowledge about the state of the world, and they do not have complete control, as the effects of their actions are uncertain. While most classical planning methods avoid explicit uncertainty reasoning, we believe that uncertainty should be explicitly represented and reasoned about. We develop a probabilistic representation for states and actions, based on belief networks. We define conditional belief nets (CBNs) to capture the probabilistic dependency of the effects of an action upon the state of the world. We also use a CBN to represent the intrinsic relationships among entities in the environment, which persist from state to state. We present a simple projection algorithm to construct the belief network of the state succeeding an action, using the environment CBN model to infer indirect effects. We discuss how the qualitative aspects of belief networks and CBNs make them appropriate for the various stages of the problem solving process, from model construction to the design of planning algorithms.