 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariable-Input Deep Operator Networks
May 23, 2022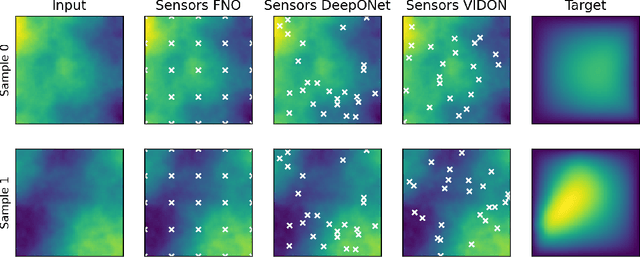
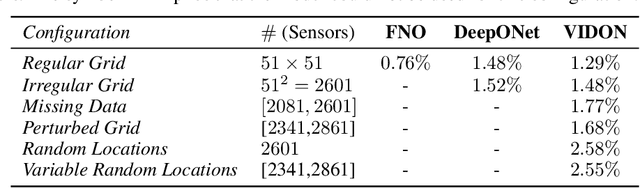
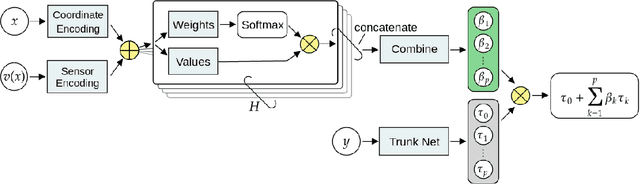

Existing architectures for operator learning require that the number and locations of sensors (where the input functions are evaluated) remain the same across all training and test samples, significantly restricting the range of their applicability. We address this issue by proposing a novel operator learning framework, termed Variable-Input Deep Operator Network (VIDON), which allows for random sensors whose number and locations can vary across samples. VIDON is invariant to permutations of sensor locations and is proved to be universal in approximating a class of continuous operators. We also prove that VIDON can efficiently approximate operators arising in PDEs. Numerical experiments with a diverse set of PDEs are presented to illustrate the robust performance of VIDON in learning operators.