 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInside-out Infrared Marker Tracking via Head Mounted Displays for Smart Robot Programming
Mar 28, 2023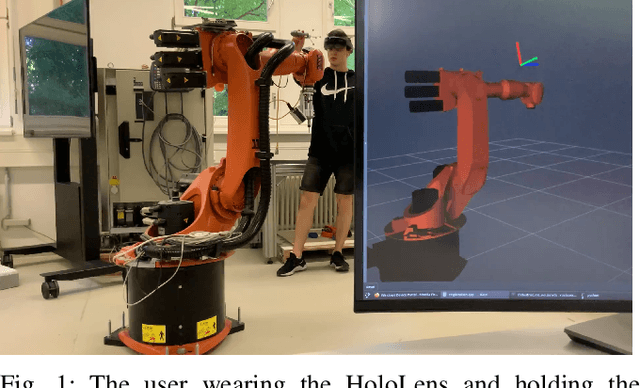
Intuitive robot programming through use of tracked smart input devices relies on fixed, external tracking systems, most often employing infra-red markers. Such an approach is frequently combined with projector-based augmented reality for better visualisation and interface. The combined system, although providing an intuitive programming platform with short cycle times even for inexperienced users, is immobile, expensive and requires extensive calibration. When faced with a changing environment and large number of robots it becomes sorely impractical. Here we present our work on infra-red marker tracking using the Microsoft HoloLens head-mounted display. The HoloLens can map the environment, register the robot on-line, and track smart devices equipped with infra-red markers in the robot coordinate system. We envision our work to provide the basis to transfer many of the paradigms developed over the years for systems requiring a projector and a tracked input device into a highly-portable system that does not require any calibration or special set-up. We test the quality of the marker-tracking in an industrial robot cell and compare our tracking with a ground truth obtained via an ART-3 tracking system.