 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOscillatory background activity implements a backbone for sampling-based computations in spiking neural networks
Jun 19, 2020



Various data suggest that the brain carries out probabilistic inference. Models that perform inference through sampling are particularly appealing since instead of requiring networks to perform sophisticated mathematical operations, they can simply exploit stochasticity in neuron behavior. However, sampling from complex distributions is a hard problem. In particular, mixing behavior is often very sensitive to the temperature parameter which controls the stochasticity of the sampler. We propose that background oscillations, an ubiquitous phenomenon throughout the brain, can mitigate this issue and thus implement the backbone for sampling-based computations in spiking neural networks. We first show that both in current-based and conductance-based neuron models, the level of background activity effectively defines the sampling temperature of the network. This mechanism allows brain networks to flexibly control the sampling behavior, either favoring convergence to local optima or promoting mixing. We then demonstrate that background oscillations can in this way structure stochastic computations into discrete sampling episodes. In each such episode, solutions are first explored at high temperatures before annealing to low temperatures favors convergence to a good solution.
Camera-based vehicle velocity estimation from monocular video
Feb 20, 2018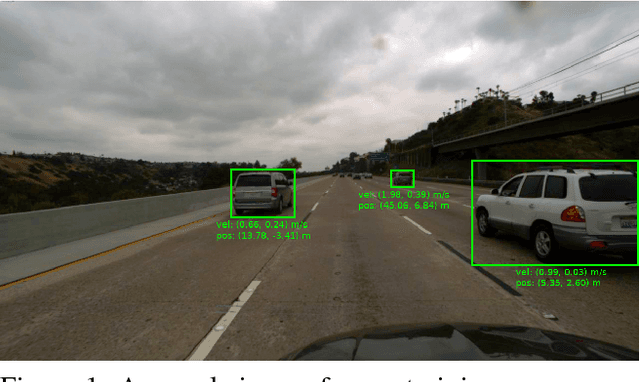

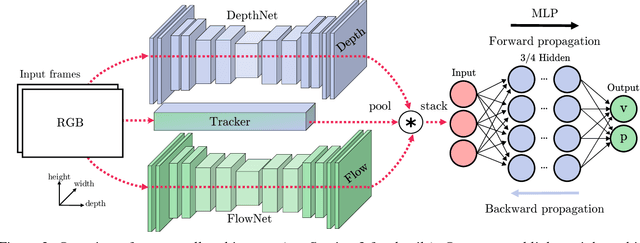

This paper documents the winning entry at the CVPR2017 vehicle velocity estimation challenge. Velocity estimation is an emerging task in autonomous driving which has not yet been thoroughly explored. The goal is to estimate the relative velocity of a specific vehicle from a sequence of images. In this paper, we present a light-weight approach for directly regressing vehicle velocities from their trajectories using a multilayer perceptron. Another contribution is an explorative study of features for monocular vehicle velocity estimation. We find that light-weight trajectory based features outperform depth and motion cues extracted from deep ConvNets, especially for far-distance predictions where current disparity and optical flow estimators are challenged significantly. Our light-weight approach is real-time capable on a single CPU and outperforms all competing entries in the velocity estimation challenge. On the test set, we report an average error of 1.12 m/s which is comparable to a (ground-truth) system that combines LiDAR and radar techniques to achieve an error of around 0.71 m/s.