 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCMU-GPR Dataset: Ground Penetrating Radar Dataset for Robot Localization and Mapping
Jul 15, 2021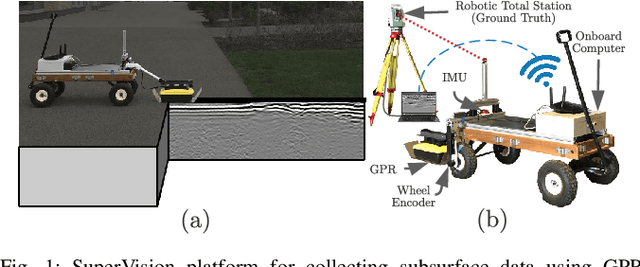
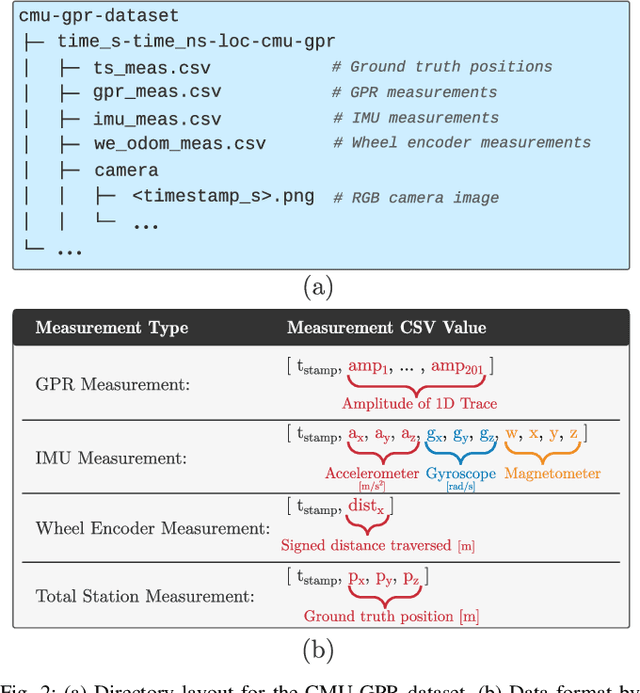
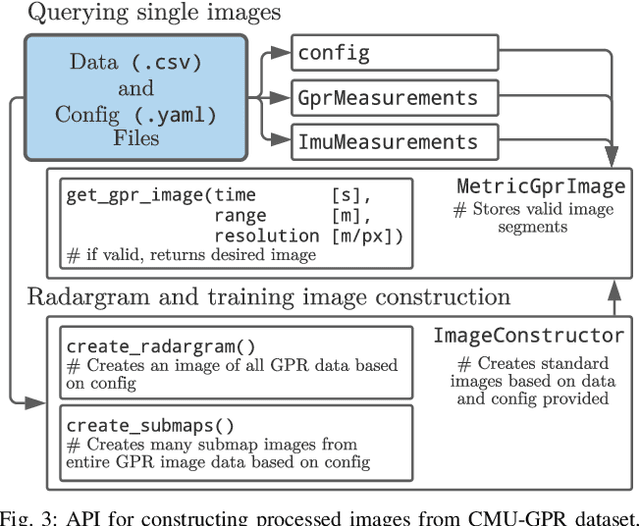
There has been exciting recent progress in using radar as a sensor for robot navigation due to its increased robustness to varying environmental conditions. However, within these different radar perception systems, ground penetrating radar (GPR) remains under-explored. By measuring structures beneath the ground, GPR can provide stable features that are less variant to ambient weather, scene, and lighting changes, making it a compelling choice for long-term spatio-temporal mapping. In this work, we present the CMU-GPR dataset--an open-source ground penetrating radar dataset for research in subsurface-aided perception for robot navigation. In total, the dataset contains 15 distinct trajectory sequences in 3 GPS-denied, indoor environments. Measurements from a GPR, wheel encoder, RGB camera, and inertial measurement unit were collected with ground truth positions from a robotic total station. In addition to the dataset, we also provide utility code to convert raw GPR data into processed images. This paper describes our recording platform, the data format, utility scripts, and proposed methods for using this data.
Ground Encoding: Learned Factor Graph-based Models for Localizing Ground Penetrating Radar
Mar 29, 2021
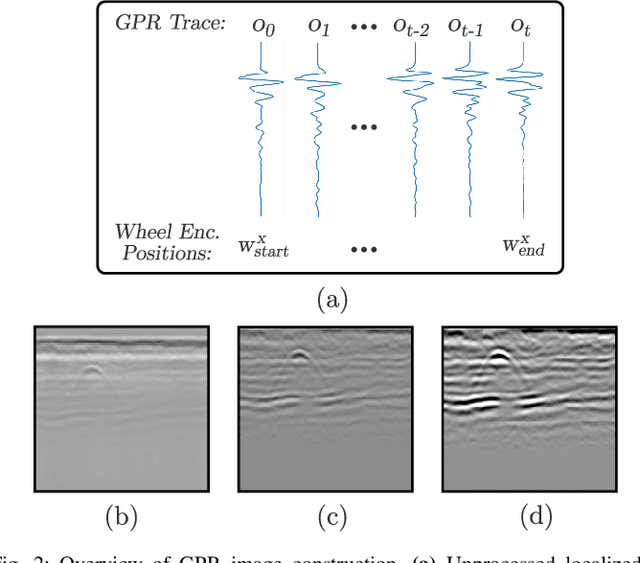

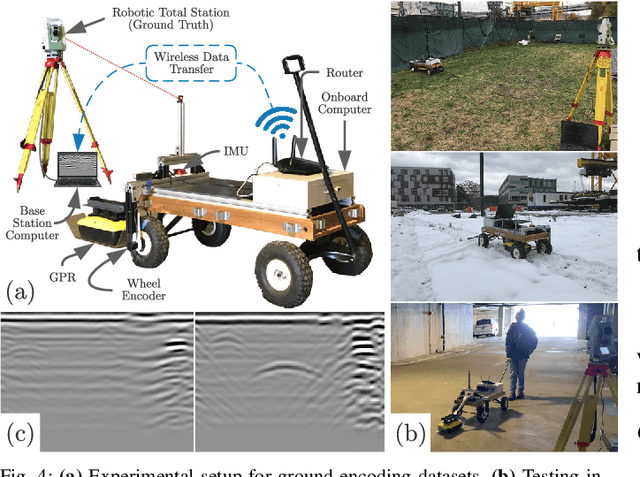
We address the problem of robot localization using ground penetrating radar (GPR) sensors. Current approaches for localization with GPR sensors require a priori maps of the system's environment as well as access to approximate global positioning (GPS) during operation. In this paper, we propose a novel, real-time GPR-based localization system for unknown and GPS-denied environments. We model the localization problem as an inference over a factor graph. Our approach combines 1D single-channel GPR measurements to form 2D image submaps. To use these GPR images in the graph, we need sensor models that can map noisy, high-dimensional image measurements into the state space. These are challenging to obtain a priori since image generation has a complex dependency on subsurface composition and radar physics, which itself varies with sensors and variations in subsurface electromagnetic properties. Our key idea is to instead learn relative sensor models directly from GPR data that map non-sequential GPR image pairs to relative robot motion. These models are incorporated as factors within the factor graph with relative motion predictions correcting for accumulated drift in the position estimates. We demonstrate our approach over datasets collected across multiple locations using a custom designed experimental rig. We show reliable, real-time localization using only GPR and odometry measurements for varying trajectories in three distinct GPS-denied environments. For our supplementary video, see https://youtu.be/HXXgdTJzqyw.