 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Actuator Optimization of Lightweight and Compliant Knee Exoskeleton for Mobility Assistance of Children with Crouch Gait
Jan 01, 2021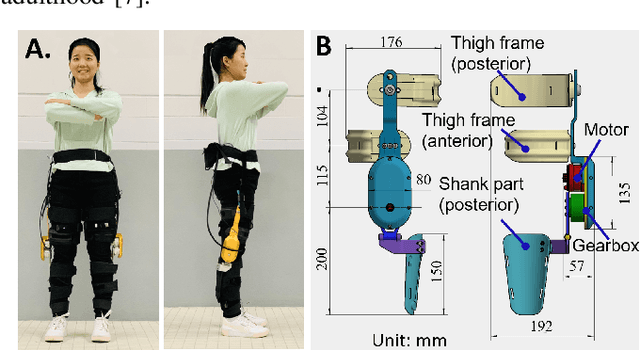
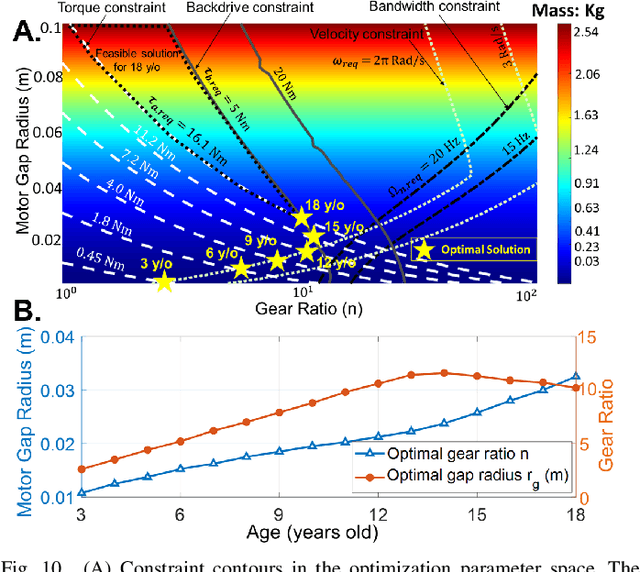
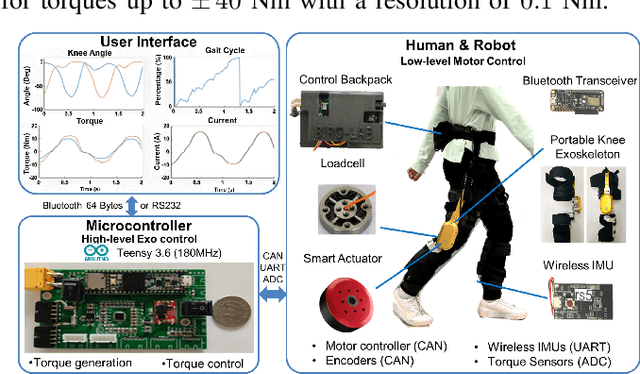

Pediatric exoskeletons offer great promise to increase mobility for children with crouch gait caused by cerebral palsy. A lightweight, compliant and user-specific actuator is critical for maximizing the benefits of an exoskeleton to users. To date, pediatric exoskeletons generally use the same actuators as adult exoskeletons, which are heavy and resistive to natural movement. There is yet no easy way for robotic exoskeletons to accommodate the changes in design requirements that occur as a child ages. We developed a lightweight (1.65 kg unilateral mass) and compliant pediatric knee exoskeleton with a bandwidth of 22.6 Hz that can provide torque assistance to children with crouch gait using high torque density motor. Experimental results demonstrated that the robot exhibited low mechanical impedance (1.79 Nm average backdrive torque) under the unpowered condition and 0.32 Nm with zero-torque tracking control. Root mean square (RMS) error of torque tracking result is less than 0.73 Nm (5.7% with respect to 12 Nm torque). To achieve optimal age-specific performance, we proposed the first optimization framework that considered both motor and transmission of the actuator system that can produce optimal settings for children between 3 and 18 years old. The optimization generated an optimal motor air gap radius that monotonically increases with age from 0.011 to 0.033 meters, and optimal gear ratio varies from 2.6 to 11.6 (3-13 years old) and 11.6 to 10.2 (13-18 years old), leading to actuators of minimal mass.