 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDrone-based Object Counting by Spatially Regularized Regional Proposal Network
Aug 03, 2017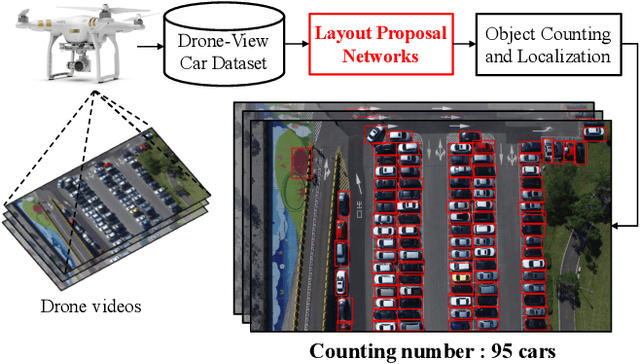

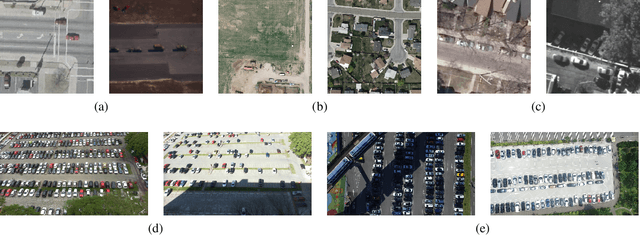
Existing counting methods often adopt regression-based approaches and cannot precisely localize the target objects, which hinders the further analysis (e.g., high-level understanding and fine-grained classification). In addition, most of prior work mainly focus on counting objects in static environments with fixed cameras. Motivated by the advent of unmanned flying vehicles (i.e., drones), we are interested in detecting and counting objects in such dynamic environments. We propose Layout Proposal Networks (LPNs) and spatial kernels to simultaneously count and localize target objects (e.g., cars) in videos recorded by the drone. Different from the conventional region proposal methods, we leverage the spatial layout information (e.g., cars often park regularly) and introduce these spatially regularized constraints into our network to improve the localization accuracy. To evaluate our counting method, we present a new large-scale car parking lot dataset (CARPK) that contains nearly 90,000 cars captured from different parking lots. To the best of our knowledge, it is the first and the largest drone view dataset that supports object counting, and provides the bounding box annotations.