 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCarbonChat: Large Language Model-Based Corporate Carbon Emission Analysis and Climate Knowledge Q&A System
Jan 03, 2025


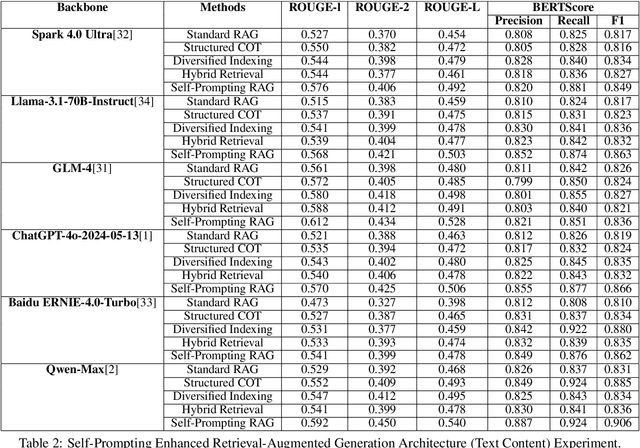
As the impact of global climate change intensifies, corporate carbon emissions have become a focal point of global attention. In response to issues such as the lag in climate change knowledge updates within large language models, the lack of specialization and accuracy in traditional augmented generation architectures for complex problems, and the high cost and time consumption of sustainability report analysis, this paper proposes CarbonChat: Large Language Model-based corporate carbon emission analysis and climate knowledge Q&A system, aimed at achieving precise carbon emission analysis and policy understanding.First, a diversified index module construction method is proposed to handle the segmentation of rule-based and long-text documents, as well as the extraction of structured data, thereby optimizing the parsing of key information.Second, an enhanced self-prompt retrieval-augmented generation architecture is designed, integrating intent recognition, structured reasoning chains, hybrid retrieval, and Text2SQL, improving the efficiency of semantic understanding and query conversion.Next, based on the greenhouse gas accounting framework, 14 dimensions are established for carbon emission analysis, enabling report summarization, relevance evaluation, and customized responses.Finally, through a multi-layer chunking mechanism, timestamps, and hallucination detection features, the accuracy and verifiability of the analysis results are ensured, reducing hallucination rates and enhancing the precision of the responses.
Learning Occupancy Function from Point Clouds for Surface Reconstruction
Oct 22, 2020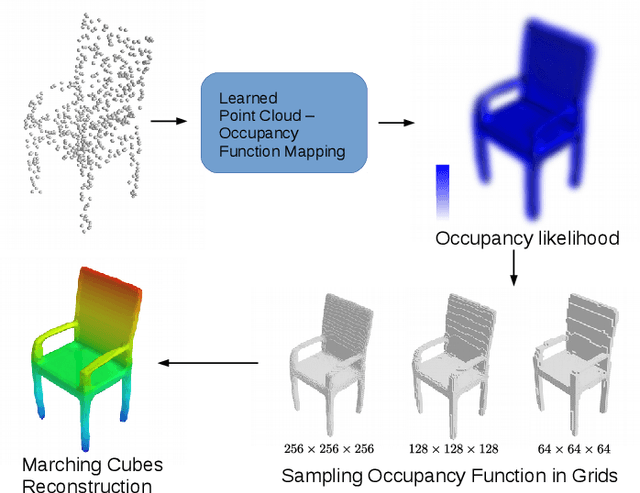
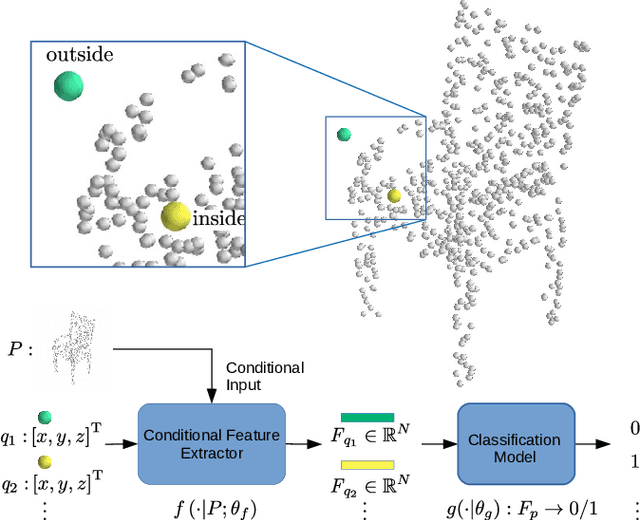
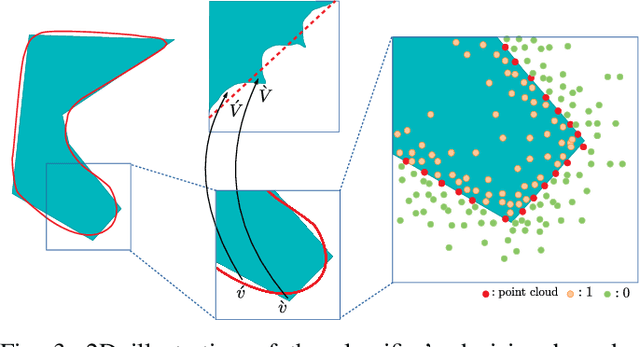
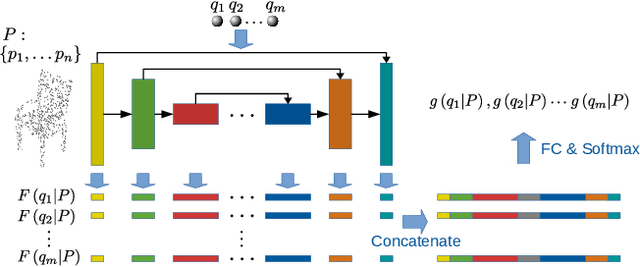
Implicit function based surface reconstruction has been studied for a long time to recover 3D shapes from point clouds sampled from surfaces. Recently, Signed Distance Functions (SDFs) and Occupany Functions are adopted in learning-based shape reconstruction methods as implicit 3D shape representation. This paper proposes a novel method for learning occupancy functions from sparse point clouds and achieves better performance on challenging surface reconstruction tasks. Unlike the previous methods, which predict point occupancy with fully-connected multi-layer networks, we adapt the point cloud deep learning architecture, Point Convolution Neural Network (PCNN), to build our learning model. Specifically, we create a sampling operator and insert it into PCNN to continuously sample the feature space at the points where occupancy states need to be predicted. This method natively obtains point cloud data's geometric nature, and it's invariant to point permutation. Our occupancy function learning can be easily fit into procedures of point cloud up-sampling and surface reconstruction. Our experiments show state-of-the-art performance for reconstructing With ShapeNet dataset and demonstrate this method's well-generalization by testing it with McGill 3D dataset \cite{siddiqi2008retrieving}. Moreover, we find the learned occupancy function is relatively more rotation invariant than previous shape learning methods.