 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Attack Against Image-Based Localization Neural Networks
Oct 11, 2022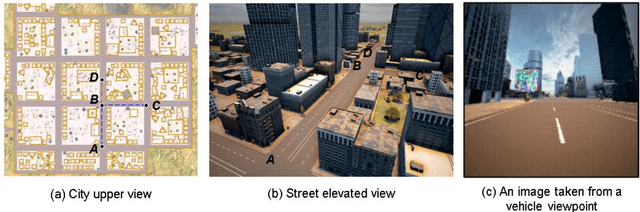

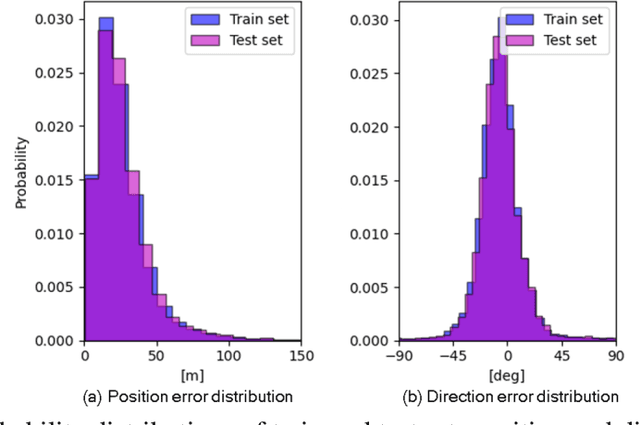
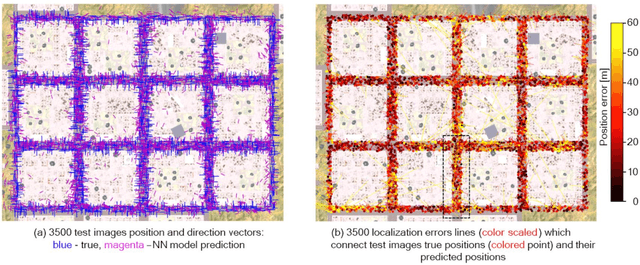
In this paper, we present a proof of concept for adversarially attacking the image-based localization module of an autonomous vehicle. This attack aims to cause the vehicle to perform a wrong navigational decisions and prevent it from reaching a desired predefined destination in a simulated urban environment. A database of rendered images allowed us to train a deep neural network that performs a localization task and implement, develop and assess the adversarial pattern. Our tests show that using this adversarial attack we can prevent the vehicle from turning at a given intersection. This is done by manipulating the vehicle's navigational module to falsely estimate its current position and thus fail to initialize the turning procedure until the vehicle misses the last opportunity to perform a safe turn in a given intersection.