Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCINet: A Learning Based Approach to Incremental Context Modeling in Robots
Jul 29, 2018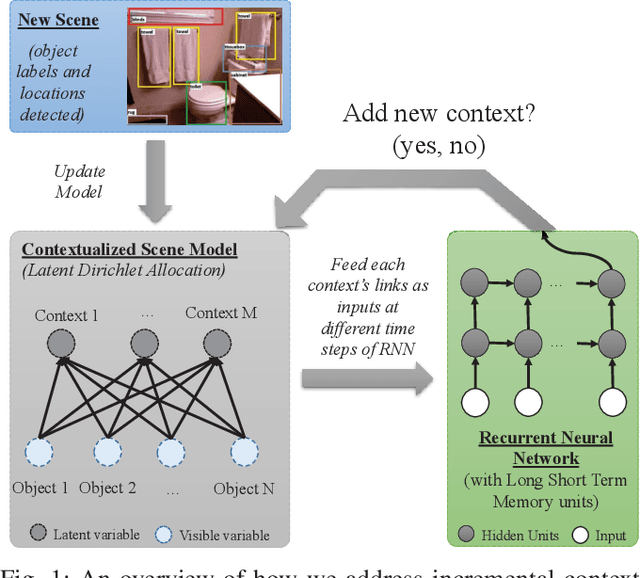
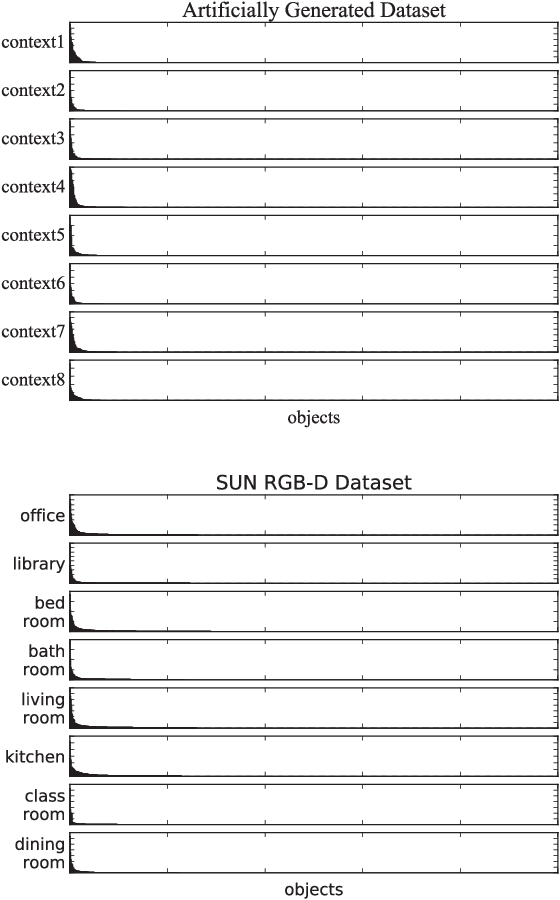
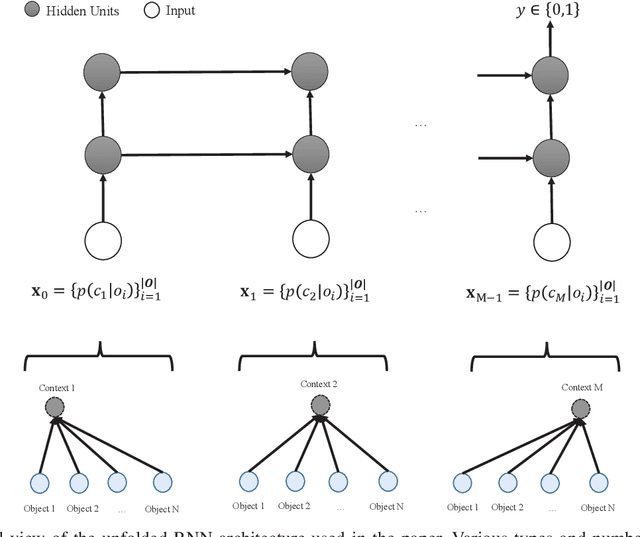
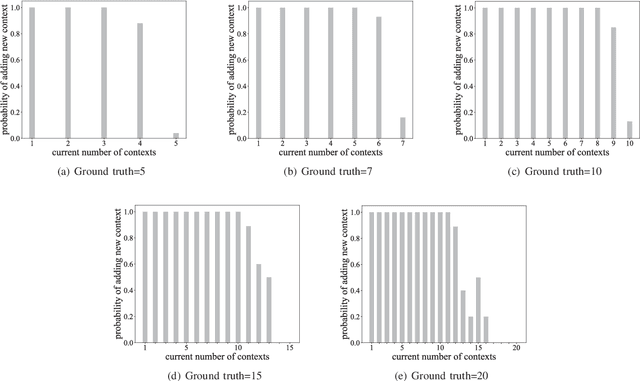
There have been several attempts at modeling context in robots. However, either these attempts assume a fixed number of contexts or use a rule-based approach to determine when to increment the number of contexts. In this paper, we pose the task of when to increment as a learning problem, which we solve using a Recurrent Neural Network. We show that the network successfully (with 98\% testing accuracy) learns to predict when to increment, and demonstrate, in a scene modeling problem (where the correct number of contexts is not known), that the robot increments the number of contexts in an expected manner (i.e., the entropy of the system is reduced). We also present how the incremental model can be used for various scene reasoning tasks.
* The first two authors have contributed equally, 6 pages, 8 figures,
International Conference on Intelligent Robots (IROS 2018)
Via