 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Contact Model based on Denoising Diffusion to Learn Variable Impedance Control for Contact-rich Manipulation
Mar 20, 2024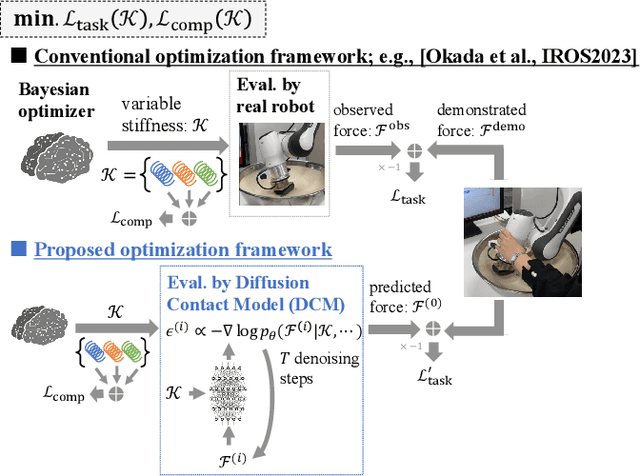
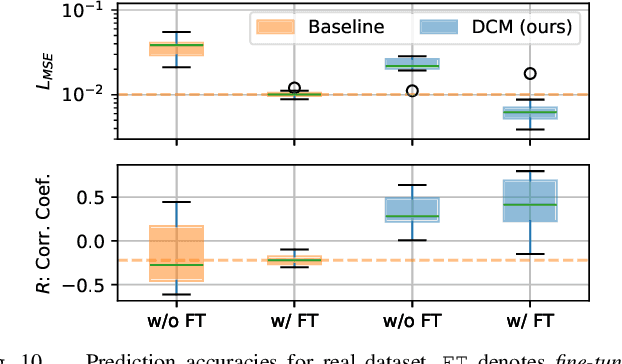
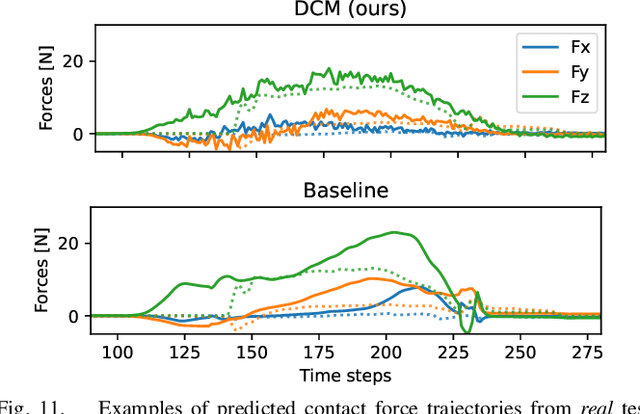
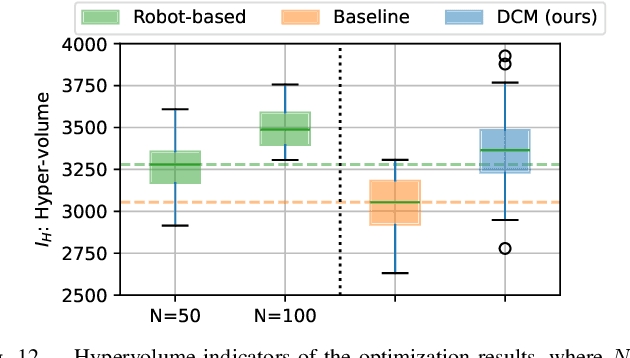
In this paper, a novel approach is proposed for learning robot control in contact-rich tasks such as wiping, by developing Diffusion Contact Model (DCM). Previous methods of learning such tasks relied on impedance control with time-varying stiffness tuning by performing Bayesian optimization by trial-and-error with robots. The proposed approach aims to reduce the cost of robot operation by predicting the robot contact trajectories from the variable stiffness inputs and using neural models. However, contact dynamics are inherently highly nonlinear, and their simulation requires iterative computations such as convex optimization. Moreover, approximating such computations by using finite-layer neural models is difficult. To overcome these limitations, the proposed DCM used the denoising diffusion models that could simulate the complex dynamics via iterative computations of multi-step denoising, thus improving the prediction accuracy. Stiffness tuning experiments conducted in simulated and real environments showed that the DCM achieved comparable performance to a conventional robot-based optimization method while reducing the number of robot trials.
Learning Compliant Stiffness by Impedance Control-Aware Task Segmentation and Multi-objective Bayesian Optimization with Priors
Jul 28, 2023



Rather than traditional position control, impedance control is preferred to ensure the safe operation of industrial robots programmed from demonstrations. However, variable stiffness learning studies have focused on task performance rather than safety (or compliance). Thus, this paper proposes a novel stiffness learning method to satisfy both task performance and compliance requirements. The proposed method optimizes the task and compliance objectives (T/C objectives) simultaneously via multi-objective Bayesian optimization. We define the stiffness search space by segmenting a demonstration into task phases, each with constant responsible stiffness. The segmentation is performed by identifying impedance control-aware switching linear dynamics (IC-SLD) from the demonstration. We also utilize the stiffness obtained by proposed IC-SLD as priors for efficient optimization. Experiments on simulated tasks and a real robot demonstrate that IC-SLD-based segmentation and the use of priors improve the optimization efficiency compared to existing baseline methods.