 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLipschitz Optimization for Formal Verification of Homographies
May 22, 2026The adoption of vision neural networks in regulated industries requires formal robustness guarantees, especially in safety-critical domains such as healthcare, autonomous vehicles, and aerospace. However, current approaches are confined to incomplete statistical verification or robustness to $\ell_p$-norm and affine transforms, which cover only a narrow subset of perturbations to the image formation process. In particular, robustness to camera motion remains an open problem despite being key to deploy many vision applications. We present a formal verification approach that targets robustness against 3D motion perturbations of the capturing camera. We first establish a closed-form mapping from camera pose to pixel values. By analyzing the continuity properties of the resulting homographies, we show that recent work on Lipschitz optimization and piecewise continuity can be extended to derive tight linear bounds on perturbed pixel values. Our approach applies to scenes with predominantly planar structure, such as ground planes in augmented reality, road markings and traffic signs in autonomous driving, or planar workspaces in robotic manipulation. This enables the first formal verification of projective geometry transforms, without complex simulation, surrogate networks, or explicit image-formation models. We validate our implementation and show up to 89% speedup and 7% tighter bounds over prior work. We then evaluate our method on the VNN-COMP benchmark and reveal systematic weaknesses to projective perturbations. Finally, we demonstrate a real-world case study on a safety-critical runway classifier, highlighting practical vulnerabilities to camera motion, and addressing a key challenge in the certification of learned models. Data and code are publicly available at https://github.com/jeangud/homography-verification .
Bayesian Safety Validation for Black-Box Systems
May 03, 2023Accurately estimating the probability of failure for safety-critical systems is important for certification. Estimation is often challenging due to high-dimensional input spaces, dangerous test scenarios, and computationally expensive simulators; thus, efficient estimation techniques are important to study. This work reframes the problem of black-box safety validation as a Bayesian optimization problem and introduces an algorithm, Bayesian safety validation, that iteratively fits a probabilistic surrogate model to efficiently predict failures. The algorithm is designed to search for failures, compute the most-likely failure, and estimate the failure probability over an operating domain using importance sampling. We introduce a set of three acquisition functions that focus on reducing uncertainty by covering the design space, optimizing the analytically derived failure boundaries, and sampling the predicted failure regions. Mainly concerned with systems that only output a binary indication of failure, we show that our method also works well in cases where more output information is available. Results show that Bayesian safety validation achieves a better estimate of the probability of failure using orders of magnitude fewer samples and performs well across various safety validation metrics. We demonstrate the algorithm on three test problems with access to ground truth and on a real-world safety-critical subsystem common in autonomous flight: a neural network-based runway detection system. This work is open sourced and currently being used to supplement the FAA certification process of the machine learning components for an autonomous cargo aircraft.
Framework for Certification of AI-Based Systems
Feb 21, 2023



The current certification process for aerospace software is not adapted to "AI-based" algorithms such as deep neural networks. Unlike traditional aerospace software, the precise parameters optimized during neural network training are as important as (or more than) the code processing the network and they are not directly mathematically understandable. Despite their lack of explainability such algorithms are appealing because for some applications they can exhibit high performance unattainable with any traditional explicit line-by-line software methods. This paper proposes a framework and principles that could be used to establish certification methods for neural network models for which the current certification processes such as DO-178 cannot be applied. While it is not a magic recipe, it is a set of common sense steps that will allow the applicant and the regulator increase their confidence in the developed software, by demonstrating the capabilities to bring together, trace, and track the requirements, data, software, training process, and test results.
Trajectory Clustering and an Application to Airspace Monitoring
Jan 27, 2010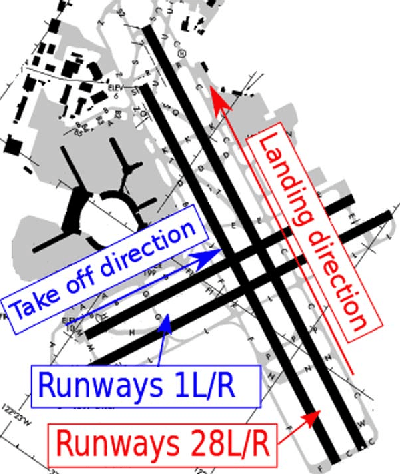
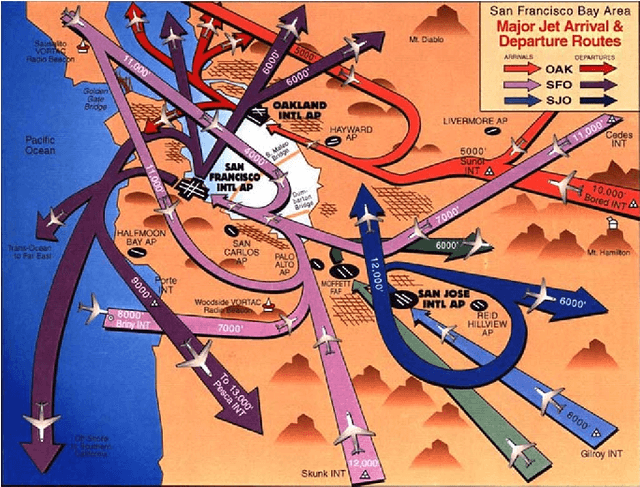
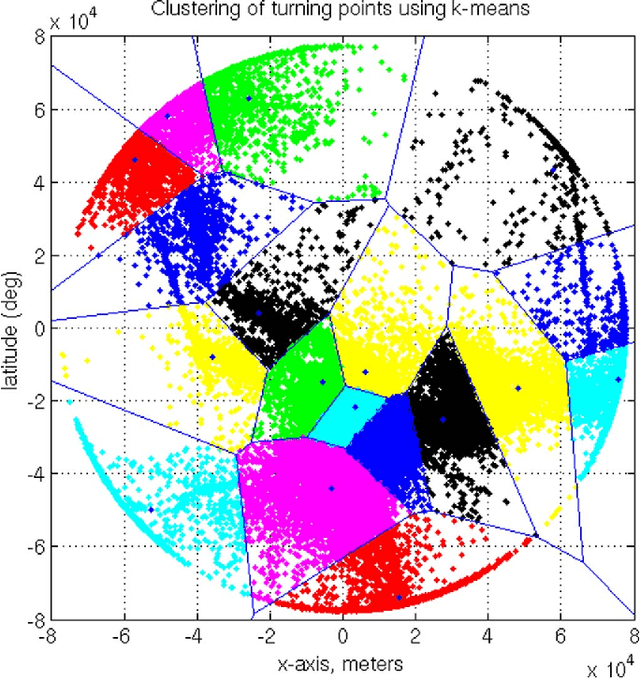
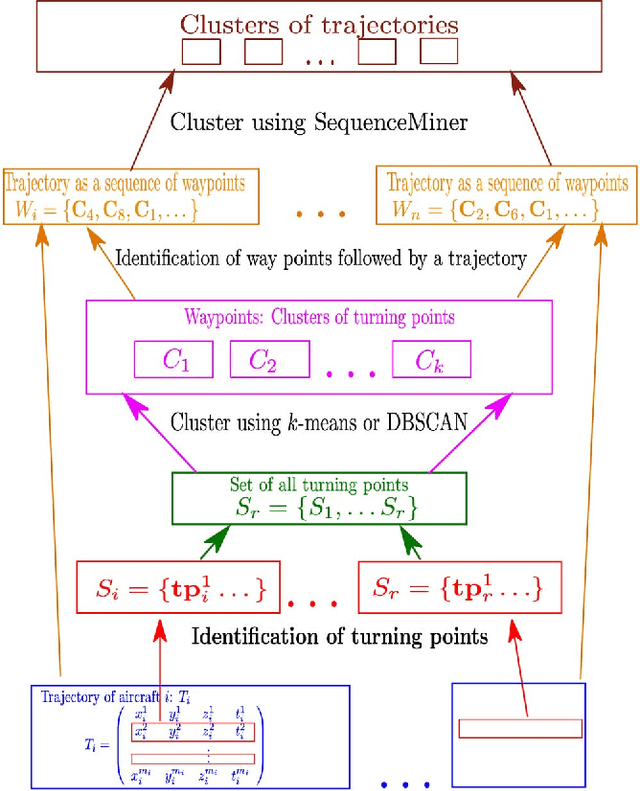
This paper presents a framework aimed at monitoring the behavior of aircraft in a given airspace. Nominal trajectories are determined and learned using data driven methods. Standard procedures are used by air traffic controllers (ATC) to guide aircraft, ensure the safety of the airspace, and to maximize the runway occupancy. Even though standard procedures are used by ATC, the control of the aircraft remains with the pilots, leading to a large variability in the flight patterns observed. Two methods to identify typical operations and their variability from recorded radar tracks are presented. This knowledge base is then used to monitor the conformance of current operations against operations previously identified as standard. A tool called AirTrajectoryMiner is presented, aiming at monitoring the instantaneous health of the airspace, in real time. The airspace is "healthy" when all aircraft are flying according to the nominal procedures. A measure of complexity is introduced, measuring the conformance of current flight to nominal flight patterns. When an aircraft does not conform, the complexity increases as more attention from ATC is required to ensure a safe separation between aircraft.