 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVectorized Scenario Description and Motion Prediction for Scenario-Based Testing
Feb 02, 2023



Automated vehicles (AVs) are tested in diverse scenarios, typically specified by parameters such as velocities, distances, or curve radii. To describe scenarios uniformly independent of such parameters, this paper proposes a vectorized scenario description defined by the road geometry and vehicles' trajectories. Data of this form are generated for three scenarios, merged, and used to train the motion prediction model VectorNet, allowing to predict an AV's trajectory for unseen scenarios. Predicting scenario evaluation metrics, VectorNet partially achieves lower errors than regression models that separately process the three scenarios' data. However, for comprehensive generalization, sufficient variance in the training data must be ensured. Thus, contrary to existing methods, our proposed method can merge diverse scenarios' data and exploit spatial and temporal nuances in the vectorized scenario description. As a result, data from specified test scenarios and real-world scenarios can be compared and combined for (predictive) analyses and scenario selection.
Transfer Importance Sampling $\unicode{x2013}$ How Testing Automated Vehicles in Multiple Test Setups Helps With the Bias-Variance Tradeoff
Apr 15, 2022
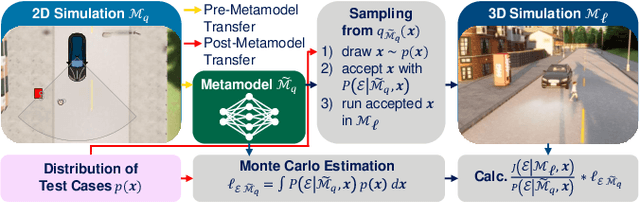
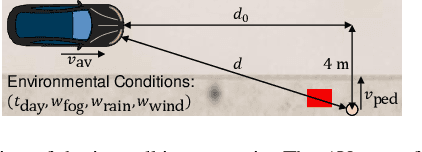
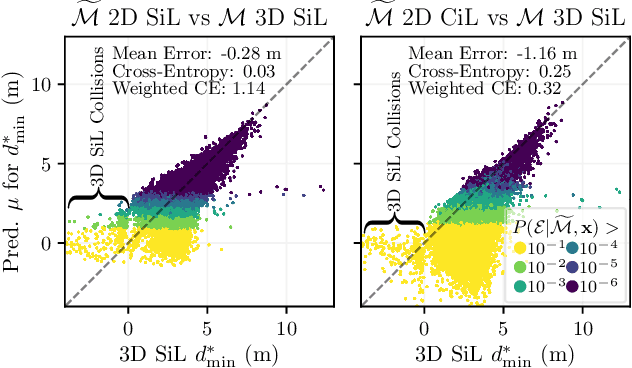
The promise of increased road safety is a key motivator for the development of automated vehicles (AV). Yet, demonstrating that an AV is as safe as, or even safer than, a human-driven vehicle has proven to be challenging. Should an AV be examined purely virtually, allowing large numbers of fully controllable tests? Or should it be tested under real environmental conditions on a proving ground? Since different test setups have different strengths and weaknesses, it is still an open question how virtual and real tests should be combined. On the way to answer this question, this paper proposes transfer importance sampling (TIS), a risk estimation method linking different test setups. Fusing the concepts of transfer learning and importance sampling, TIS uses a scalable, cost-effective test setup to comprehensively explore an AV's behavior. The insights gained then allow parameterizing tests in a more trustworthy test setup accurately reflecting risks. We show that when using a trustworthy test setup alone is prohibitively expensive, linking it to a scalable test setup can increase efficiency $\unicode{x2013}$ without sacrificing the result's validity. Thus, the test setups' individual deficiencies are compensated for by their systematic linkage.
Probabilistic Metamodels for an Efficient Characterization of Complex Driving Scenarios
Oct 07, 2021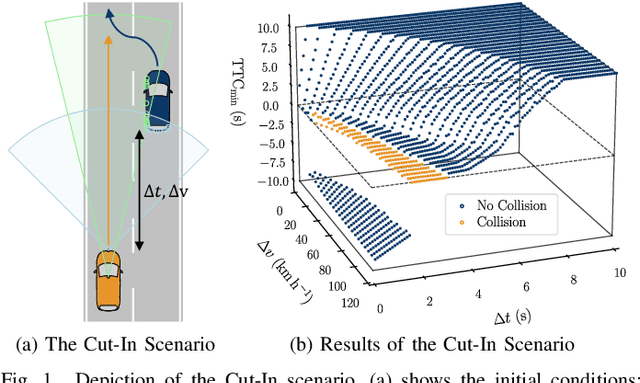
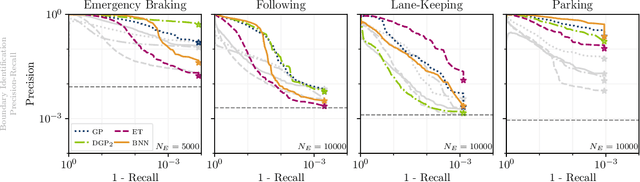

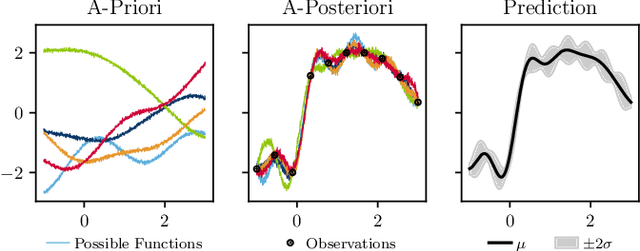
To systematically validate the safe behavior of automated vehicles (AV), the aim of scenario-based testing is to cluster the infinite situations an AV might encounter into a finite set of functional scenarios. Every functional scenario, however, can still manifest itself in a vast amount of variations. Thus, metamodels are often used to perform analyses or to select specific variations for examination. However, despite the safety criticalness of AV testing, metamodels are usually seen as a part of an overall approach, and their predictions are not further examined. In this paper, we analyze the predictive performance of Gaussian processes (GP), deep Gaussian processes, extra-trees (ET), and Bayesian neural networks (BNN), considering four scenarios with 5 to 20 inputs. Building on this, we introduce and evaluate an iterative approach to efficiently select test cases. Our results show that regarding predictive performance, the appropriate selection of test cases is more important than the choice of metamodels. While their great flexibility allows BNNs to benefit from large amounts of data and to model even the most complex scenarios, less flexible models like GPs can convince with higher reliability. This implies that relevant test cases have to be explored using scalable virtual environments and flexible models so that more realistic test environments and more trustworthy models can be used for targeted testing and validation.