 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural-based Control for CubeSat Docking Maneuvers
Oct 16, 2024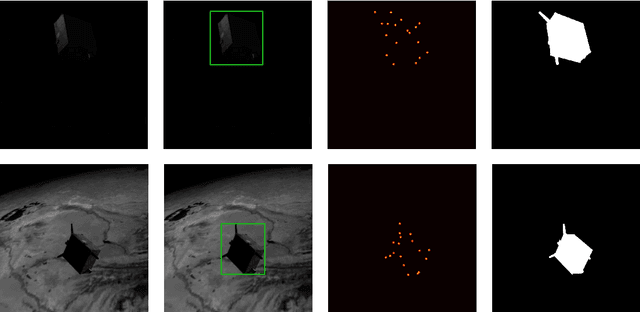
Autonomous Rendezvous and Docking (RVD) have been extensively studied in recent years, addressing the stringent requirements of spacecraft dynamics variations and the limitations of GNC systems. This paper presents an innovative approach employing Artificial Neural Networks (ANN) trained through Reinforcement Learning (RL) for autonomous spacecraft guidance and control during the final phase of the rendezvous maneuver. The proposed strategy is easily implementable onboard and offers fast adaptability and robustness to disturbances by learning control policies from experience rather than relying on predefined models. Extensive Monte Carlo simulations within a relevant environment are conducted in 6DoF settings to validate our approach, along with hardware tests that demonstrate deployment feasibility. Our findings highlight the efficacy of RL in assuring the adaptability and efficiency of spacecraft RVD, offering insights into future mission expectations.
Optimizing Multi-Task Learning for Accurate Spacecraft Pose Estimation
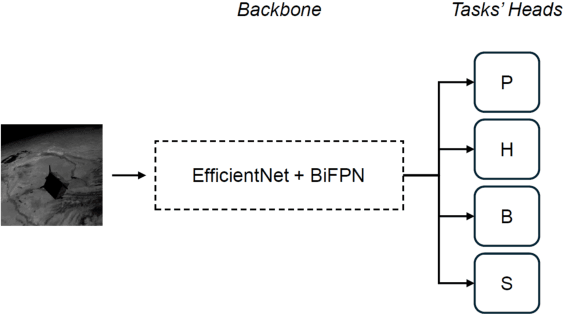
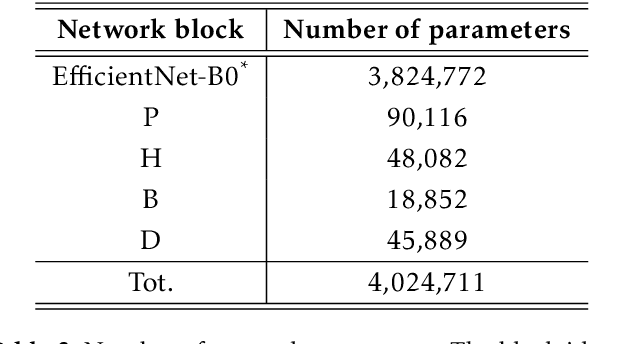
Oct 16, 2024Accurate satellite pose estimation is crucial for autonomous guidance, navigation, and control (GNC) systems in in-orbit servicing (IOS) missions. This paper explores the impact of different tasks within a multi-task learning (MTL) framework for satellite pose estimation using monocular images. By integrating tasks such as direct pose estimation, keypoint prediction, object localization, and segmentation into a single network, the study aims to evaluate the reciprocal influence between tasks by testing different multi-task configurations thanks to the modularity of the convolutional neural network (CNN) used in this work. The trends of mutual bias between the analyzed tasks are found by employing different weighting strategies to further test the robustness of the findings. A synthetic dataset was developed to train and test the MTL network. Results indicate that direct pose estimation and heatmap-based pose estimation positively influence each other in general, while both the bounding box and segmentation tasks do not provide significant contributions and tend to degrade the overall estimation accuracy.
Machine Learning in Space: Surveying the Robustness of on-board ML models to Radiation
May 04, 2024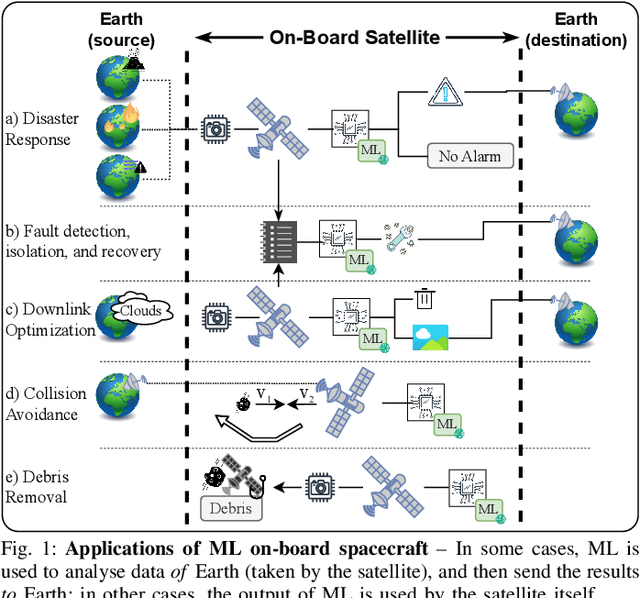


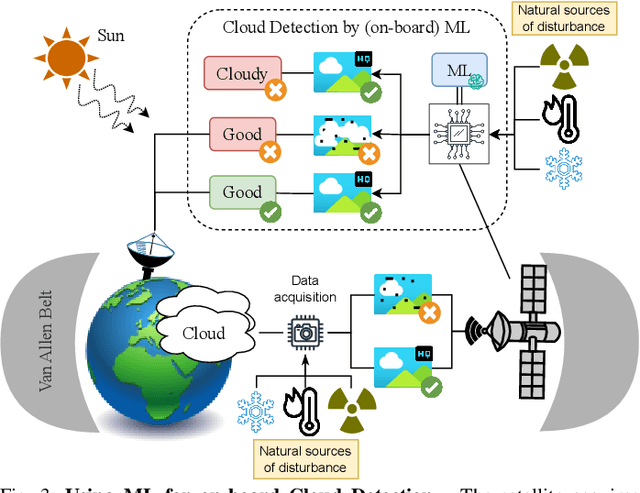
Modern spacecraft are increasingly relying on machine learning (ML). However, physical equipment in space is subject to various natural hazards, such as radiation, which may inhibit the correct operation of computing devices. Despite plenty of evidence showing the damage that naturally-induced faults can cause to ML-related hardware, we observe that the effects of radiation on ML models for space applications are not well-studied. This is a problem: without understanding how ML models are affected by these natural phenomena, it is uncertain "where to start from" to develop radiation-tolerant ML software. As ML researchers, we attempt to tackle this dilemma. By partnering up with space-industry practitioners specialized in ML, we perform a reflective analysis of the state of the art. We provide factual evidence that prior work did not thoroughly examine the impact of natural hazards on ML models meant for spacecraft. Then, through a "negative result", we show that some existing open-source technologies can hardly be used by researchers to study the effects of radiation for some applications of ML in satellites. As a constructive step forward, we perform simple experiments showcasing how to leverage current frameworks to assess the robustness of practical ML models for cloud detection against radiation-induced faults. Our evaluation reveals that not all faults are as devastating as claimed by some prior work. By publicly releasing our resources, we provide a foothold -- usable by researchers without access to spacecraft -- for spearheading development of space-tolerant ML models.