 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOA-SLAM: Leveraging Objects for Camera Relocalization in Visual SLAM
Sep 17, 2022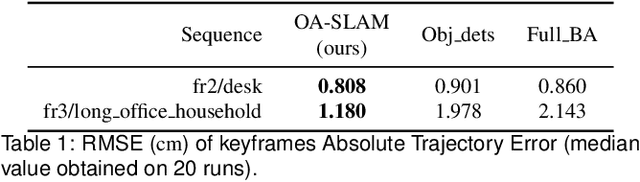

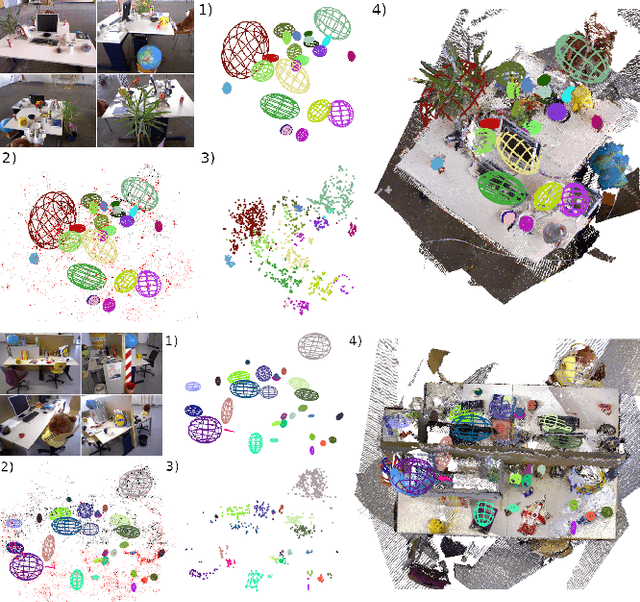

In this work, we explore the use of objects in Simultaneous Localization and Mapping in unseen worlds and propose an object-aided system (OA-SLAM). More precisely, we show that, compared to low-level points, the major benefit of objects lies in their higher-level semantic and discriminating power. Points, on the contrary, have a better spatial localization accuracy than the generic coarse models used to represent objects (cuboid or ellipsoid). We show that combining points and objects is of great interest to address the problem of camera pose recovery. Our main contributions are: (1) we improve the relocalization ability of a SLAM system using high-level object landmarks; (2) we build an automatic system, capable of identifying, tracking and reconstructing objects with 3D ellipsoids; (3) we show that object-based localization can be used to reinitialize or resume camera tracking. Our fully automatic system allows on-the-fly object mapping and enhanced pose tracking recovery, which we think, can significantly benefit to the AR community. Our experiments show that the camera can be relocalized from viewpoints where classical methods fail. We demonstrate that this localization allows a SLAM system to continue working despite a tracking loss, which can happen frequently with an uninitiated user. Our code and test data are released at gitlab.inria.fr/tangram/oa-slam.
Level Set-Based Camera Pose Estimation From Multiple 2D/3D Ellipse-Ellipsoid Correspondences
Jul 16, 2022
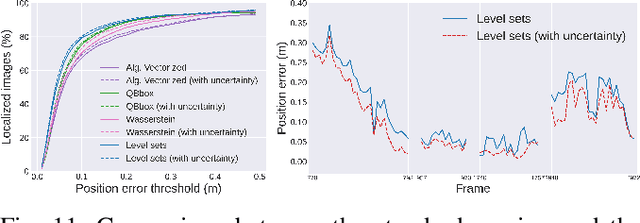
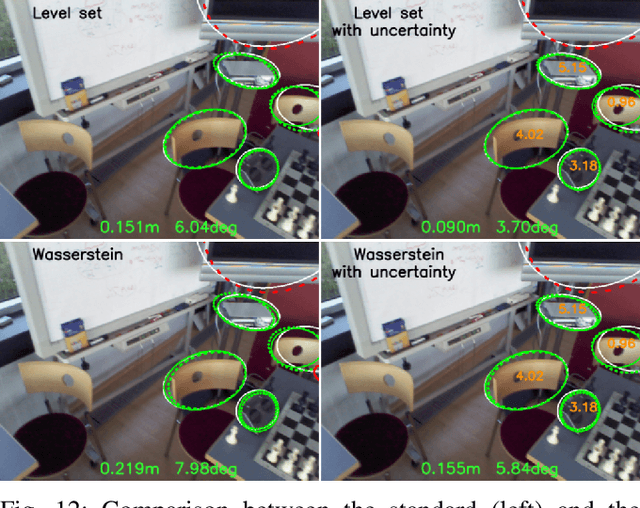
In this paper, we propose an object-based camera pose estimation from a single RGB image and a pre-built map of objects, represented with ellipsoidal models. We show that contrary to point correspondences, the definition of a cost function characterizing the projection of a 3D object onto a 2D object detection is not straightforward. We develop an ellipse-ellipse cost based on level sets sampling, demonstrate its nice properties for handling partially visible objects and compare its performance with other common metrics. Finally, we show that the use of a predictive uncertainty on the detected ellipses allows a fair weighting of the contribution of the correspondences which improves the computed pose. The code is released at https://gitlab.inria.fr/tangram/level-set-based-camera-pose-estimation.
Object-Based Visual Camera Pose Estimation From Ellipsoidal Model and 3D-Aware Ellipse Prediction
Mar 09, 2022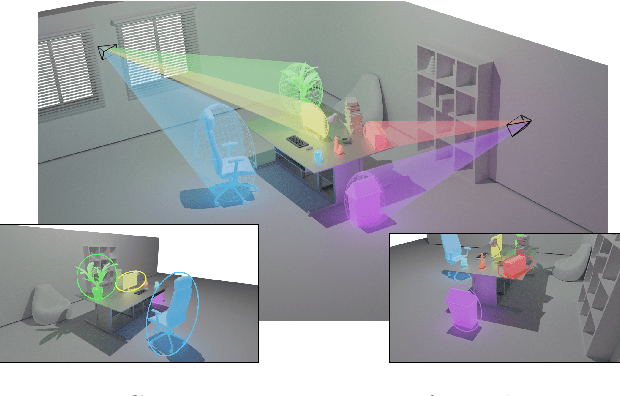


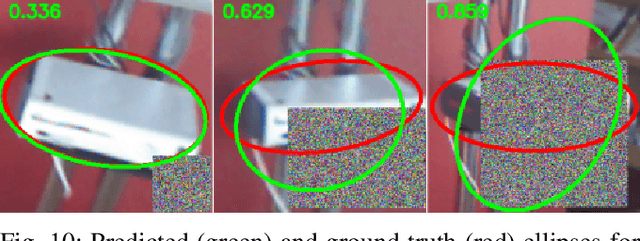
In this paper, we propose a method for initial camera pose estimation from just a single image which is robust to viewing conditions and does not require a detailed model of the scene. This method meets the growing need of easy deployment of robotics or augmented reality applications in any environments, especially those for which no accurate 3D model nor huge amount of ground truth data are available. It exploits the ability of deep learning techniques to reliably detect objects regardless of viewing conditions. Previous works have also shown that abstracting the geometry of a scene of objects by an ellipsoid cloud allows to compute the camera pose accurately enough for various application needs. Though promising, these approaches use the ellipses fitted to the detection bounding boxes as an approximation of the imaged objects. In this paper, we go one step further and propose a learning-based method which detects improved elliptic approximations of objects which are coherent with the 3D ellipsoids in terms of perspective projection. Experiments prove that the accuracy of the computed pose significantly increases thanks to our method. This is achieved with very little effort in terms of training data acquisition - a few hundred calibrated images of which only three need manual object annotation. Code and models are released at https://gitlab.inria.fr/tangram/3d-aware-ellipses-for-visual-localization
3D-Aware Ellipse Prediction for Object-Based Camera Pose Estimation
May 24, 2021

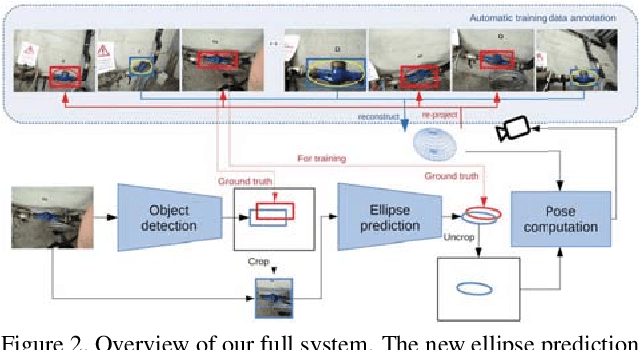
In this paper, we propose a method for coarse camera pose computation which is robust to viewing conditions and does not require a detailed model of the scene. This method meets the growing need of easy deployment of robotics or augmented reality applications in any environments, especially those for which no accurate 3D model nor huge amount of ground truth data are available. It exploits the ability of deep learning techniques to reliably detect objects regardless of viewing conditions. Previous works have also shown that abstracting the geometry of a scene of objects by an ellipsoid cloud allows to compute the camera pose accurately enough for various application needs. Though promising, these approaches use the ellipses fitted to the detection bounding boxes as an approximation of the imaged objects. In this paper, we go one step further and propose a learning-based method which detects improved elliptic approximations of objects which are coherent with the 3D ellipsoid in terms of perspective projection. Experiments prove that the accuracy of the computed pose significantly increases thanks to our method and is more robust to the variability of the boundaries of the detection boxes. This is achieved with very little effort in terms of training data acquisition -- a few hundred calibrated images of which only three need manual object annotation. Code and models are released at https://github.com/zinsmatt/3D-Aware-Ellipses-for-Visual-Localization.
* Presented at 3DV 2020. Code and models released at https://github.com/zinsmatt/3D-Aware-Ellipses-for-Visual-Localization