 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePathSpace: Rapid continuous map approximation for efficient SLAM using B-Splines in constrained environments
Mar 03, 2026Simultaneous Localization and Mapping (SLAM) plays a crucial role in enabling autonomous vehicles to navigate previously unknown environments. Semantic SLAM mostly extends visual SLAM, leveraging the higher density information available to reason about the environment in a more human-like manner. This allows for better decision making by exploiting prior structural knowledge of the environment, usually in the form of labels. Current semantic SLAM techniques still mostly rely on a dense geometric representation of the environment, limiting their ability to apply constraints based on context. We propose PathSpace, a novel semantic SLAM framework that uses continuous B-splines to represent the environment in a compact manner, while also maintaining and reasoning through the continuous probability density functions required for probabilistic reasoning. This system applies the multiple strengths of B-splines in the context of SLAM to interpolate and fit otherwise discrete sparse environments. We test this framework in the context of autonomous racing, where we exploit pre-specified track characteristics to produce significantly reduced representations at comparable levels of accuracy to traditional landmark based methods and demonstrate its potential in limiting the resources used by a system with minimal accuracy loss.
(hu)Man vs. Machine: In the Future of Motorsport, can Autonomous Vehicles Compete?
Mar 02, 2026Motorsport has historically driven technological innovation in the automotive industry. Autonomous racing provides a proving ground to push the limits of performance of autonomous vehicle (AV) systems. In principle, AVs could be at least as fast, if not faster, than humans. However, human driven racing provides broader audience appeal thus far, and is more strategically challenging. Both provide opportunities to push each other even further technologically, yet competitions remain separate. This paper evaluates whether the future of motorsport could encompass joint competition between humans and AVs. Analysis of the current state of the art, as well as recent competition outcomes, shows that while technical performance has reached comparable levels, there are substantial challenges in racecraft, strategy and safety that need to be overcome. Outstanding issues involved in mixed human-AI racing, ranging from an initial assessment of critical factors such as system-level latencies, to effective planning and risk guarantees are explored. The crucial non-technical aspect of audience engagement and appeal regarding the changing character of motorsport is addressed. In the wider context of motorsport and AVs, this work outlines a proposed agenda for future research to 'keep pushing the possible', in the true spirit of motorsport.
Active exploration for body model learning through self-touch on a humanoid robot with artificial skin
Aug 31, 2020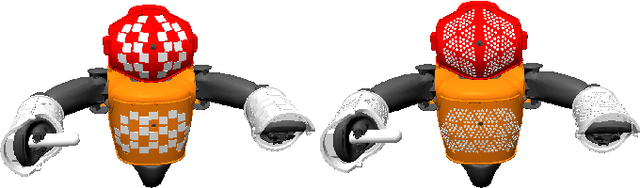
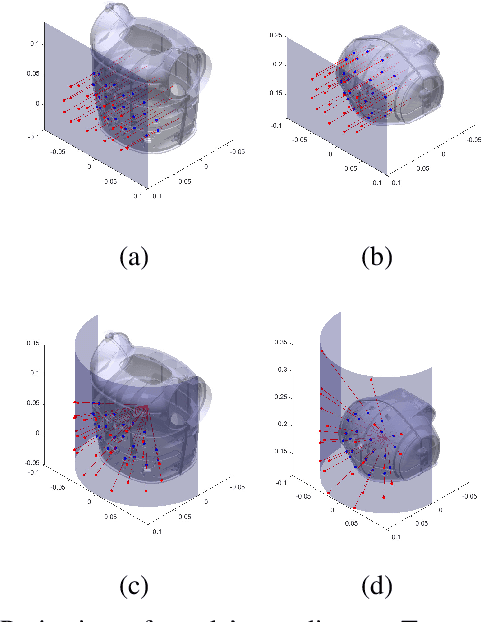
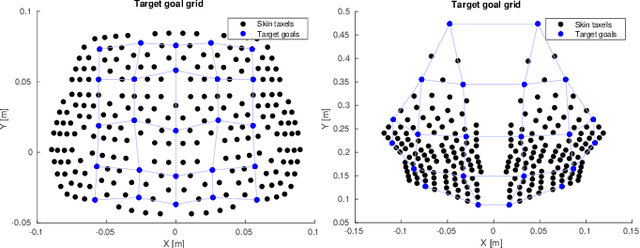
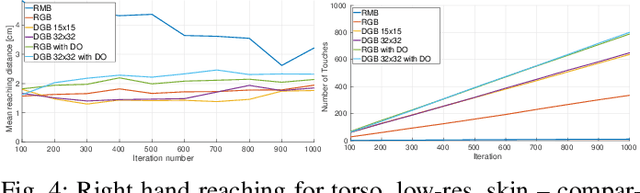
The mechanisms of infant development are far from understood. Learning about one's own body is likely a foundation for subsequent development. Here we look specifically at the problem of how spontaneous touches to the body in early infancy may give rise to first body models and bootstrap further development such as reaching competence. Unlike visually elicited reaching, reaching to own body requires connections of the tactile and motor space only, bypassing vision. Still, the problems of high dimensionality and redundancy of the motor system persist. In this work, we present an embodied computational model on a simulated humanoid robot with artificial sensitive skin on large areas of its body. The robot should autonomously develop the capacity to reach for every tactile sensor on its body. To do this efficiently, we employ the computational framework of intrinsic motivations and variants of goal babbling, as opposed to motor babbling, that prove to make the exploration process faster and alleviate the ill-posedness of learning inverse kinematics. Based on our results, we discuss the next steps in relation to infant studies: what information will be necessary to further ground this computational model in behavioral data.
Where do goals come from? A Generic Approach to Autonomous Goal-System Development
Oct 21, 2014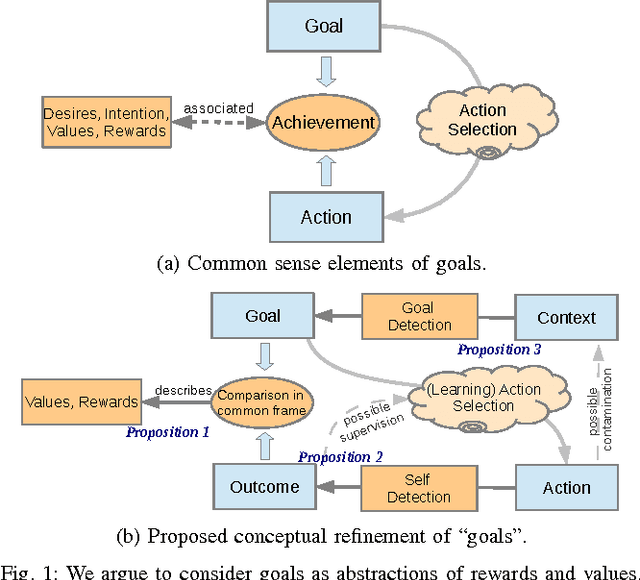
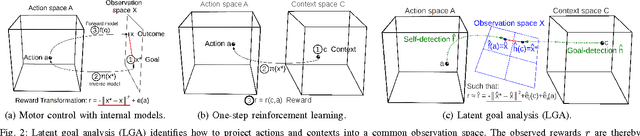

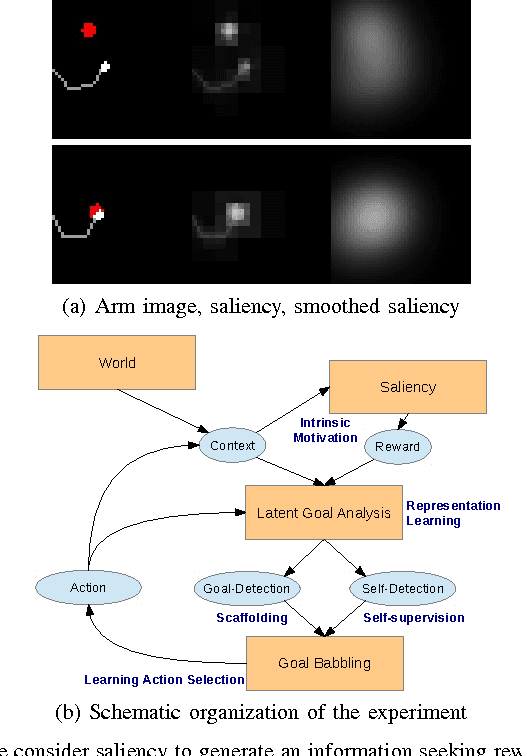
Goals express agents' intentions and allow them to organize their behavior based on low-dimensional abstractions of high-dimensional world states. How can agents develop such goals autonomously? This paper proposes a detailed conceptual and computational account to this longstanding problem. We argue to consider goals as high-level abstractions of lower-level intention mechanisms such as rewards and values, and point out that goals need to be considered alongside with a detection of the own actions' effects. We propose Latent Goal Analysis as a computational learning formulation thereof, and show constructively that any reward or value function can by explained by goals and such self-detection as latent mechanisms. We first show that learned goals provide a highly effective dimensionality reduction in a practical reinforcement learning problem. Then, we investigate a developmental scenario in which entirely task-unspecific rewards induced by visual saliency lead to self and goal representations that constitute goal-directed reaching.