 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the relationship between Benchmarking, Standards and Certification in Robotics and AI
Sep 21, 2023
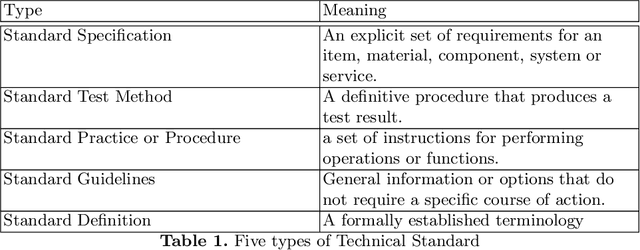
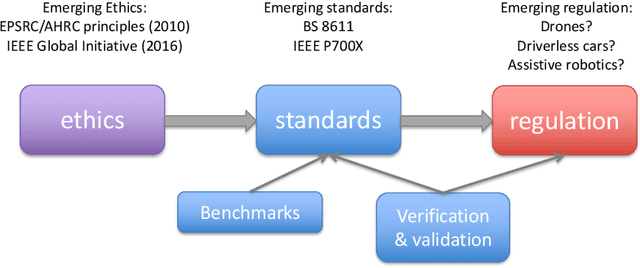
Benchmarking, standards and certification are closely related processes. Standards can provide normative requirements that robotics and AI systems may or may not conform to. Certification generally relies upon conformance with one or more standards as the key determinant of granting a certificate to operate. And benchmarks are sets of standardised tests against which robots and AI systems can be measured. Benchmarks therefore can be thought of as informal standards. In this paper we will develop these themes with examples from benchmarking, standards and certification, and argue that these three linked processes are not only useful but vital to the broader practice of Responsible Innovation.
Effects of Reward Shaping on Curriculum Learning in Goal Conditioned Tasks
Jun 06, 2022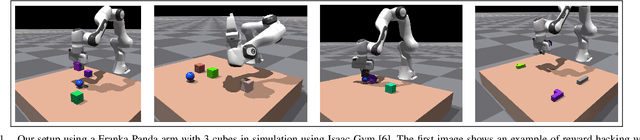
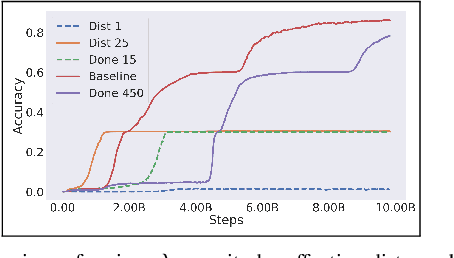
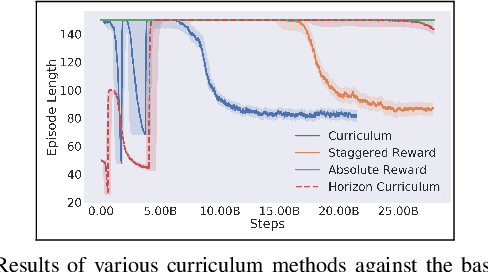
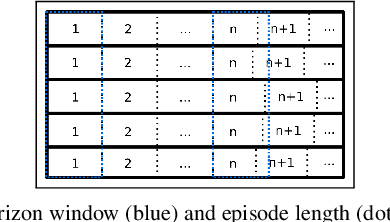
Real-time control for robotics is a popular research area in the reinforcement learning (RL) community. Through the use of techniques such as reward shaping, researchers have managed to train online agents across a multitude of domains. Despite these advances, solving goal-oriented tasks still require complex architectural changes or heavy constraints to be placed on the problem. To address this issue, recent works have explored how curriculum learning can be used to separate a complex task into sequential sub-goals, hence enabling the learning of a problem that may otherwise be too difficult to learn from scratch. In this article, we present how curriculum learning, reward shaping, and a high number of efficiently parallelized environments can be coupled together to solve the problem of multiple cube stacking. Finally, we extend the best configuration identified on a higher complexity environment with differently shaped objects.