 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIFA: Metadata, Incentives, Formats, and Accessibility guidelines to improve the reuse of AI datasets for bioimage analysis
Nov 22, 2023



Artificial Intelligence methods are powerful tools for biological image analysis and processing. High-quality annotated images are key to training and developing new methods, but access to such data is often hindered by the lack of standards for sharing datasets. We brought together community experts in a workshop to develop guidelines to improve the reuse of bioimages and annotations for AI applications. These include standards on data formats, metadata, data presentation and sharing, and incentives to generate new datasets. We are positive that the MIFA (Metadata, Incentives, Formats, and Accessibility) recommendations will accelerate the development of AI tools for bioimage analysis by facilitating access to high quality training data.
bAIoimage analysis: elevating the rate of scientific discovery -- as a community
Mar 29, 2023The future of bioimage analysis is increasingly defined by the development and use of tools that rely on deep learning and artificial intelligence (AI). For this trend to continue in a way most useful for stimulating scientific progress, it will require our multidisciplinary community to work together, establish FAIR data sharing and deliver usable, reproducible analytical tools.
Kilombo: a Kilobot simulator to enable effective research in swarm robotics
May 09, 2016
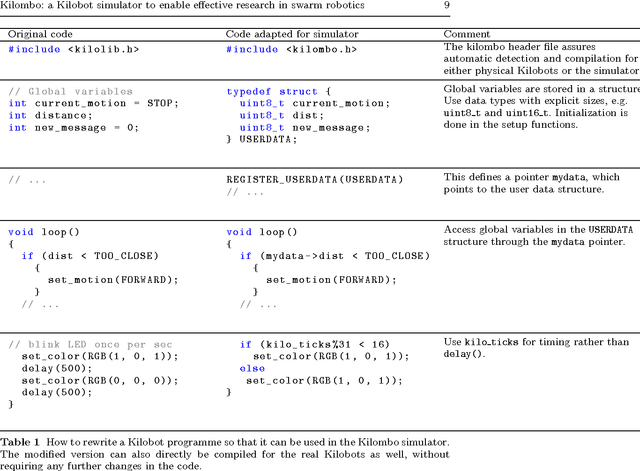

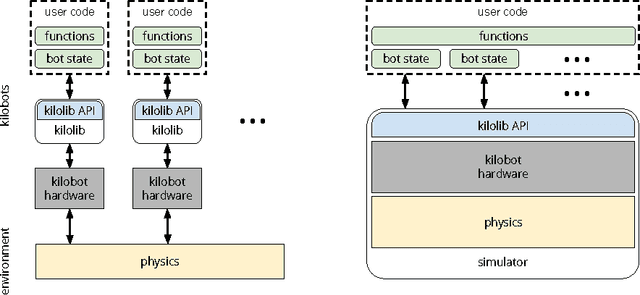
The Kilobot is a widely used platform for investigation of swarm robotics. Physical Kilobots are slow moving and require frequent recalibration and charging, which significantly slows down the development cycle. Simulators can speed up the process of testing, exploring and hypothesis generation, but usually require time consuming and error-prone translation of code between simulator and robot. Moreover, code of different nature often obfuscates direct comparison, as well as determination of the cause of deviation, between simulator and actual robot swarm behaviour. To tackle these issues we have developed a C-based simulator that allows those working with Kilobots to use the same programme code in both the simulator and the physical robots. Use of our simulator, coined Kilombo, significantly simplifies and speeds up development, given that a simulation of 1000 robots can be run at a speed 100 times faster than real time on a desktop computer, making high-throughput pre-screening possible of potential algorithms that could lead to desired emergent behaviour. We argue that this strategy, here specifically developed for Kilobots, is of general importance for effective robot swarm research. The source code is freely available under the MIT license.