 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeText-to-Image Generation for Vocabulary Learning Using the Keyword Method
Jan 28, 2025



The 'keyword method' is an effective technique for learning vocabulary of a foreign language. It involves creating a memorable visual link between what a word means and what its pronunciation in a foreign language sounds like in the learner's native language. However, these memorable visual links remain implicit in the people's mind and are not easy to remember for a large set of words. To enhance the memorisation and recall of the vocabulary, we developed an application that combines the keyword method with text-to-image generators to externalise the memorable visual links into visuals. These visuals represent additional stimuli during the memorisation process. To explore the effectiveness of this approach we first run a pilot study to investigate how difficult it is to externalise the descriptions of mental visualisations of memorable links, by asking participants to write them down. We used these descriptions as prompts for text-to-image generator (DALL-E2) to convert them into images and asked participants to select their favourites. Next, we compared different text-to-image generators (DALL-E2, Midjourney, Stable and Latent Diffusion) to evaluate the perceived quality of the generated images by each. Despite heterogeneous results, participants mostly preferred images generated by DALL-E2, which was used also for the final study. In this study, we investigated whether providing such images enhances the retention of vocabulary being learned, compared to the keyword method only. Our results indicate that people did not encounter difficulties describing their visualisations of memorable links and that providing corresponding images significantly improves memory retention.
Teaching Shortest Path Algorithms With a Robot and Overlaid Projections
Nov 23, 2024Robots have the potential to enhance teaching of advanced computer science topics, making abstract concepts more tangible and interactive. In this paper, we present Timmy-a GoPiGo robot augmented with projections to demonstrate shortest path algorithms in an interactive learning environment. We integrated a JavaScript-based application that is projected around the robot, which allows users to construct graphs and visualise three different shortest path algorithms with colour-coded edges and vertices. Animated graph exploration and traversal are augmented by robot movements. To evaluate Timmy, we conducted two user studies. An initial study (n=10) to explore the feasibility of this type of teaching where participants were just observing both robot-synced and the on-screen-only visualisations. And a pilot study (n=6) where participants actively interacted with the system, constructed graphs and selected desired algorithms. In both studies we investigated the preferences towards the system and not the teaching outcome. Initial findings suggest that robots offer an engaging tool for teaching advanced algorithmic concepts, but highlight the need for further methodological refinements and larger-scale studies to fully evaluate their effectiveness.
* 10 pages, 12 references, 3 figures
Teach Me How to ImproVISe: Co-Designing an Augmented Piano Training System for Improvisation
Feb 05, 2024
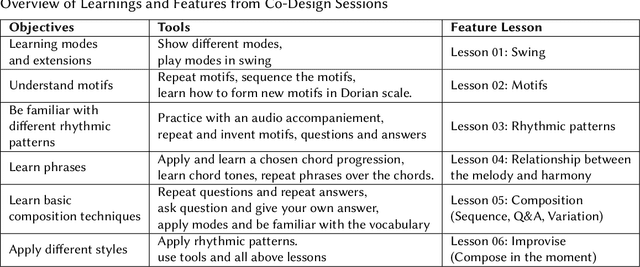
Improvisation is a vital but often neglected aspect of traditional piano teaching. Challenges such as difficulty in assessment and subjectivity have hindered its effective instruction. Technological approaches, including augmentation, aim to enhance piano instruction, but the specific application of digital augmentation for piano improvisation is under-explored. This paper outlines a co-design process developing an Augmented Reality (AR) Piano Improvisation Training System, ImproVISe, involving improvisation teachers. The prototype, featuring basic improvisation concepts, was created and refined through expert interaction. Their insights guided the identification of objectives, tools, interaction metaphors, and software features. The findings offer design guidelines and recommendations to address challenges in assessing piano improvisation in a learning context.