 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBypassing or flying above the obstacles? A novel multi-objective UAV path planning problem
Apr 12, 2020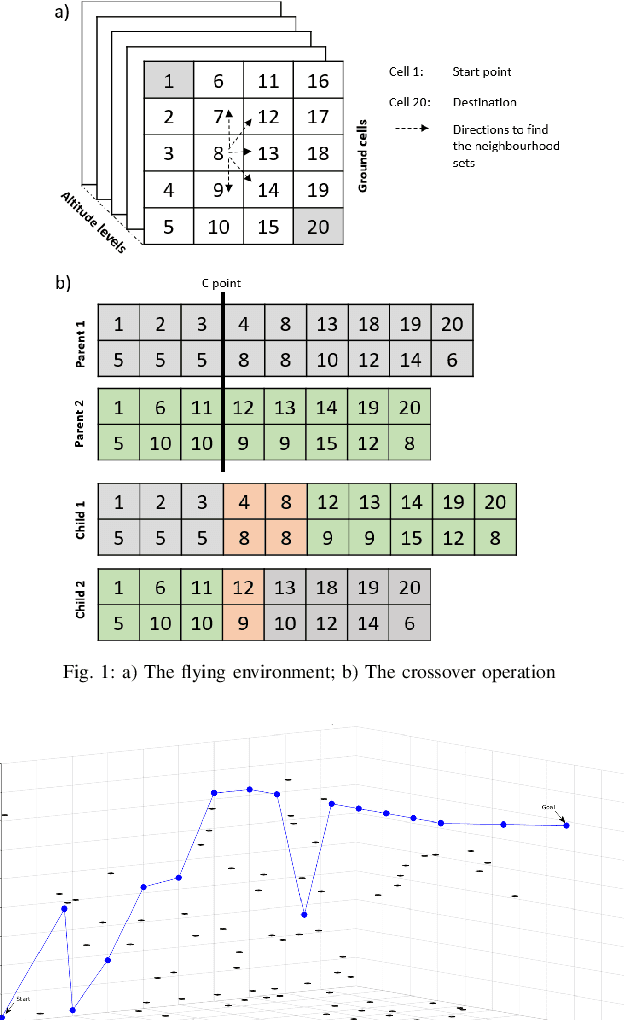
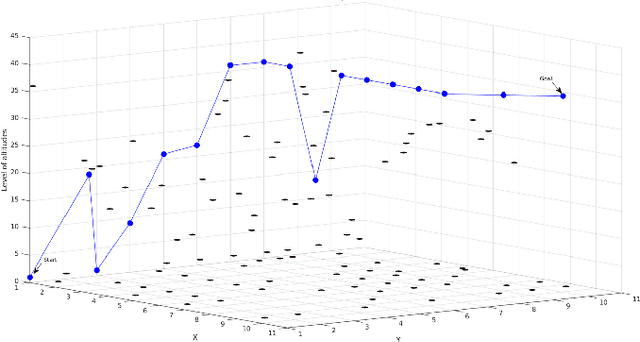
This study proposes a novel multi-objective integer programming model for a collision-free discrete drone path planning problem. Considering the possibility of bypassing obstacles or flying above them, this study aims to minimize the path length, energy consumption, and maximum path risk simultaneously. The static environment is represented as 3D grid cells. Due to the NP-hardness nature of the problem, several state-of-theart evolutionary multi-objective optimization (EMO) algorithms with customized crossover and mutation operators are applied to find a set of non-dominated solutions. The results show the effectiveness of applied algorithms in solving several generated test cases.
From feature selection to continuous optimization
Nov 01, 2019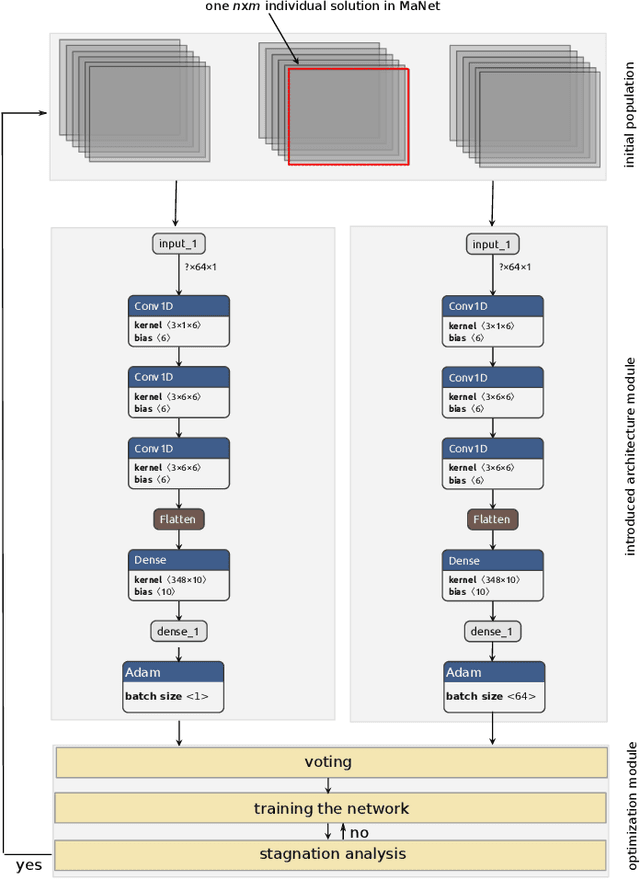
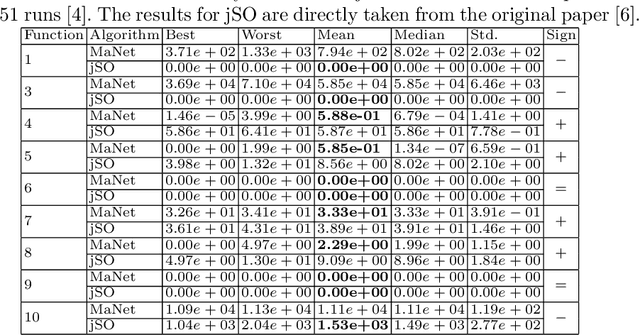
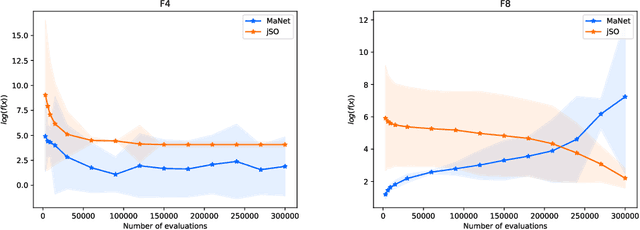
Metaheuristic algorithms (MAs) have seen unprecedented growth thanks to their successful applications in fields including engineering and health sciences. In this work, we investigate the use of a deep learning (DL) model as an alternative tool to do so. The proposed method, called MaNet, is motivated by the fact that most of the DL models often need to solve massive nasty optimization problems consisting of millions of parameters. Feature selection is the main adopted concepts in MaNet that helps the algorithm to skip irrelevant or partially relevant evolutionary information and uses those which contribute most to the overall performance. The introduced model is applied on several unimodal and multimodal continuous problems. The experiments indicate that MaNet is able to yield competitive results compared to one of the best hand-designed algorithms for the aforementioned problems, in terms of the solution accuracy and scalability.
Automatic hyperparameter selection in Autodock
Dec 02, 2018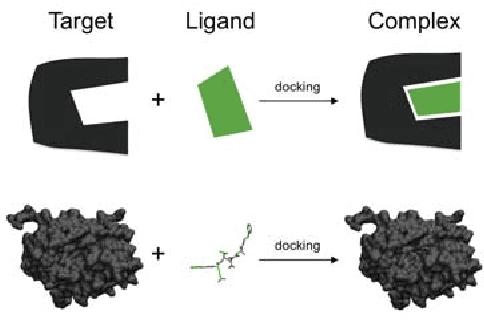
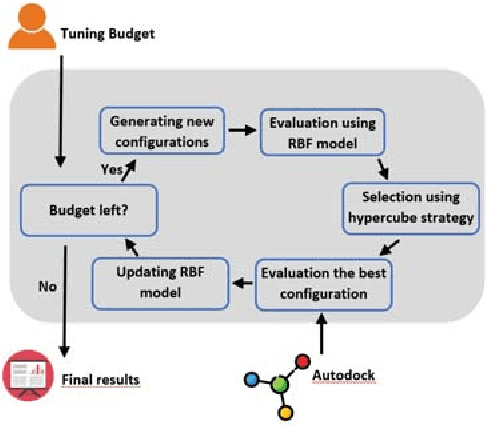
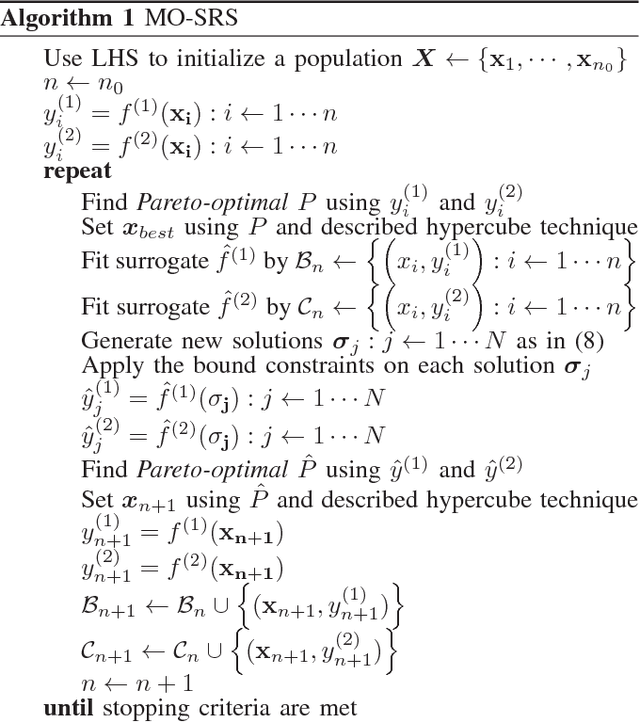
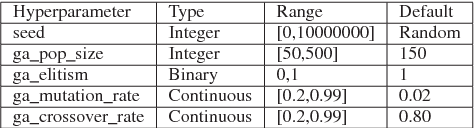
Autodock is a widely used molecular modeling tool which predicts how small molecules bind to a receptor of known 3D structure. The current version of AutoDock uses meta-heuristic algorithms in combination with local search methods for doing the conformation search. Appropriate settings of hyperparameters in these algorithms are important, particularly for novice users who often find it hard to identify the best configuration. In this work, we design a surrogate based multi-objective algorithm to help such users by automatically tuning hyperparameter settings. The proposed method iteratively uses a radial basis function model and non-dominated sorting to evaluate the sampled configurations during the search phase. Our experimental results using Autodock show that the introduced component is practical and effective.